-

Fototrend
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-
Nem rossz ötlet, de pont a lövéssel nincs gondom, ott nem kell távolságot mérni.

Beacon jelnek tényleg lehetne használni, de az a baj az ultrahanggal, hogy egyrészt nagyon irányított, tehát 360°-ra kellene vagy 8db adóvevő, másrészt 80cm-en túl gyakorlatilag használhatatlan. Ezen kívül nagyon érzékeny a visszaverődésekre (hiszen ez a dolga), és ha két robot széklábak és játéktároló dobozok közt bújkálva keresi egymást, annyi visszhang lenne, hogy nem lehetne használni.
De tartaléktervnek azért elteszem. -
válasz
 Janos250
#10639
üzenetére
Janos250
#10639
üzenetére
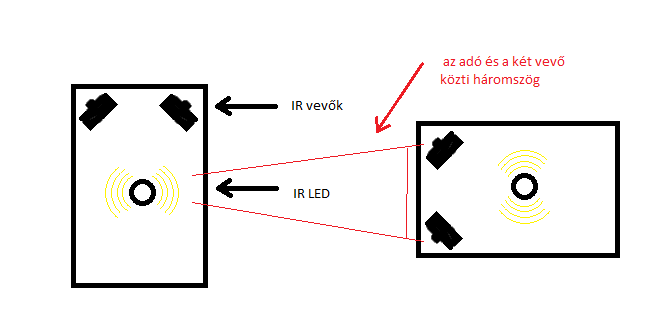
Egy nagyon vázlatos rajz:

Az IR led bizonyos időközönként kiküld egy 1-2 byte-os beacon üzenetet, amit vagy látnak a körülötte lévő robotok, vagy nem, az üzenet tartalma pedig a robot azonosító száma, és egyéb rendszerüzenetek, pl. lövés (ez utóbbi üzenet csak egy dedikált, irányított LED-ből fog érkezni, vagyis csak az fogja látni, akit "eltalál" vele).
Ezt az üzenetet több különböző teljesítményen (pl 5mA - 100mA) szándékozok küldeni egymás után, ami reményeim szerint csak bizonyos távolságokból látható (pl az 1-es erősségű jel csak 20cm-ről, az 5-ös erősségű meg mondjuk 3 méterről), ebből a vevő robot egy hozzávetőleges távolsági becslést fog tudni számolni az alapján, hogy melyik infra vevő melyik jelet fogta. Az üzenetben természetesen benne lesz, hogy milyen erősséggel lett kiküldve. Példa: "15" <- az 1-es számú robot 5-ös erősségű beacon jele.
Nem kell se a távolságot, se az irányt pontosan tudni, elég, ha annyit tud az egyik robot, hogy a másik előtte van, vagy tőle jobbra, közel, közepesen távol, vagy valahol messze.
Mondjuk egy ilyen koordináta rendszerben: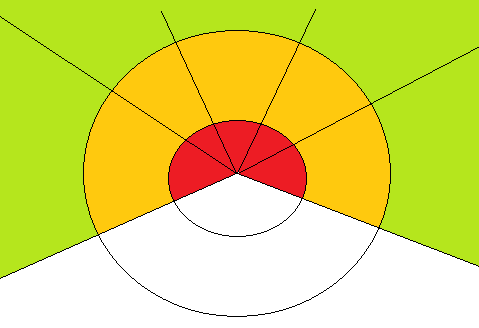
A piros a közel, a zöld a távol, a többi meg látszik a rajzon.Amit most leírtam, pontosan ezt tudja a Lego Spybotics robot, 76kHz-es IR vevőkkel és ledekkel. Azt szeretném lemásolni.
-
válasz
 tvamos
#10635
üzenetére
tvamos
#10635
üzenetére
Meg mernék esküdni, hogy az utóbbi két napban legalább háromszor leírtam már (én ugyan high pass filtert írtam), de legyen:
Szükségem lenne egy bandpass filterre, ami egy ir tranzisztor jelét szűri olyan módon, hogy megfelelő amplitúdójú 38kHz-es négyszögjelre alacsony jelszintet hozzon létre egy esp8266 bemenetén.
Hiába van ez a tervező, ezzel a rajzzal nem tudok mit kezdeni:
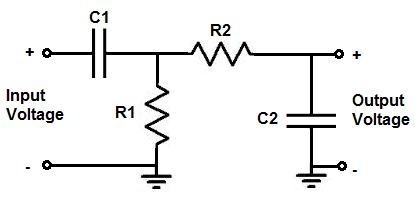
Nem a számolás részével van problémám, nincs kész kapcsolási rajzom!
Hova kössem az ir tranzisztort? Hogy fog ez nekem alacsony jelet produkálni az arduino bemenetén? -
válasz
 brickm
#10632
üzenetére
brickm
#10632
üzenetére
Most az egész projektet nem érted, vagy azt sem, hogy kellene egy 32kHz vágási frekvenciával rendelkező high pass filtert tervezni ir tranzisztorhoz, ami egy esp8266 bemenetét vezérelné? Bemegy egy 38kHz négyszögjel, ennek az amplitúdóját szeretném megkapni analóg módon az esp bemenetére.
-
válasz
Janos250
#10630
üzenetére
"Tehát van egy mozgó kocsi, aminek infókat akarsz küldeni IR-en. Ez alapján akkor a vevőnek a kocsin kell lenni."
Igen, és az adónak is! Így beszélgetnének egymással. Minden kocsin 1 vagy 2 LED az adó, és 3-4 vevő. A ledek fényét pedig valamilyen kerek, fényvisszaverő felülettel szórnám, hogy 360°-ban le tudjam fedni a környezetét.
"Ahhoz, hogy elfogadható pontosságot kapj, muszáj lesz (szerintem) a vevőt egy pincurka servo- vagy léptetőmotorral az adó, azaz a maximális jel erősség irányába állítani"
Ez biztosan nem így lesz, vagy 3db vevő lesz körben az autón, egymással kb 120°-os szögben, vagy ha ennek túl nagy lenne a holt tere, ami elég valószínű, akkor 4 vevő, 90° szögben. A háromszögelés pedig 1 adó + két vevő között történne.
"b.) Egyszerre akarod a kódot is és a távolságot is megkapni. Akkor jön a vér izzadása, hogy mindenféle szűrésekkel megold."
Ezt akarom. A vért pedig már izzadom vagy 3 hete. 
-
-
válasz
Janos250
#10622
üzenetére
" a jel erőssége nem csak a távolságtól függ, hanem pl. attól is, milyen szöget zár be a vevő és az adó."
Ez tény, sajnos nem tudok vele mit kezdeni. Max annyit, hogy a LED fényét nem direkt módon irányítom kifelé, hanem szétszórom, tükör vagy fényvisszaverő felület segítségével."Az IR-rel a távolságmérést nem a jel erőssége, hanem a visszavert jel visszaérkezési idejéből számítják."
Na ezt majdnem biztosan állítom, hogy ebben a formában nem igaz, a sharp távolság szenzornál a beesési szögből számolják, CCD érzékelő segítségével. Sima ir tranzisztorral pedig a fény intenzitásából, itt van olyan variáció, ahol egy 555-ös IC-vel szaggatják a fényt, a vevő oldalon pedig felüláteresztő szűrővel szűrik ki a jelet a környezeti fényből, ezt akarom én is, csak szoftveresen.
Aminek a visszaérkezési idejéből számítják a távolságot, amit írtál, szerintem az a lézeres mérő, de annak már igazán nem hobbista az árszabása... -
válasz
tvamos
#10623
üzenetére
"Szerintem nem uszod meg a haromszog beiktatasat"
Persze, hogy nem, azzal szeretném az adó irányát megbecsülni, de ahhoz kell, hogy sikerüljön valami távolság adatot is végre kinyerni."En azt javasolnam, hogy eloszor dugd ossze az aramkorod, ... szaladj korbe a lakasban, kulonbozo napszakokban, "
Pontosan ezt fogom tenni. Amit nem tudok kiszámolni, azt mindig empirikusan szoktam megoldani: addig próbálgatom, amíg nem sikerül. Csak ez sajnos időigényes, és ennyi időm nincs.
Oscilloscope-om sincs sajnos. Tervezem, hogy veszek, aztán mindig másra kell a pénz. Kicsit körülményes, de megoldom valahogy anélkül. Elvégre az uart kapcsolat már összejött, pedig azt sem volt egyszerű összehozni. -
válasz
tvamos
#10620
üzenetére
Köszönöm az észrevételeket, ezekkel már tudok mit kezdeni.
"Tehat, ha a nap besut az ablakon, es a robotod azzal szembe megy, akkor nem lesz jeled."
Igen, ez egy kompromisszum, a smart car-ommal szerzett tapasztalatok alapján direkt napfényben nem hatékony a szimpla ir tranzisztor, nem akarom a fizika törvényeit megszegni, ha kell, lehúzom a redőnyt.
De ha a tsop képes direkt napfényben is működni, akkor valamilyen megoldásnak létezni kell."hogyan tudnad a tavolsagot merni, ha nem mashogy, mint egy masik tavmero szenzorral, vagy haromszogelessel."
Két ir szenzor + háromszögelés
"A terhelesed nincs impedancia illesztve. Ha a kimeneted feszultseg, akkor az R2 legalabb 100k kene legyen"
Ha jól értem az esp bemeneti impedancia számít, ami ez esetben ha jól tudom MΩ nagyságrendű. Az R2 azért ennyi, mert erre találtam példát az egyik fórumon.
"Ha mondjuk 200mVpp az AC, es 3.3V a a tap, akkor 3.2V es 3.4V kozott lesz a kimeno feszultseg. Ez kell neked?"
Igazából 0V és 3.3V közti értékeket szeretnék kapni. Hogy ezt milyen áramkörrel lehet elérni - na azt szeretném most megtudni... Gondolom kellene bele egy(-két?) dióda, ami nem engedi a jelet a tápfeszültség fölé menni.
-
válasz
Janos250
#10616
üzenetére
Én nem analóg jelet akarok átküldeni, hanem digitális információt. Emellett a küldő oldal jelerőssége alapján szeretnék hozzávetőleges távolságmérést csinálni. Tudom, hogy nem ördögtől való az ötlet, mert árulnak arduino-hoz való ir távolságszenzort, ami egy egyszerű reflektív optokapuból + némi elektronikából áll, ahol az ir led fényét frekvenciamodulálják, hogy ne zavarja a környezeti fény.
-
válasz
tvamos
#10614
üzenetére
Ennél pontosabban nem tudom leírni: egy ir receivert szeretnék, de AGC nélkül, hogy korlátozott legyen a hatósugara. 38kHz-es négyszög jelre (ez nem különösebben lényeges szempont, a lényeg, hogy a környezeti fényt hatékonyan kiszűrje) alacsony jelszintet produkáljon az arduino bemeneten.
A linkelt kapcsolási rajz szerintem ezt teljesíti (32kHz-es vágási határfrekvenciával), csak azt írtad, hogy az R2 magasabb, mint az R1, és ez nem jó. Ha nem jó, miért nem, mennyinek kellene lenni, és egyáltalán tényleg azt csinálja-e az áramkör, amit szeretnék. -
válasz
 Teasüti
#10613
üzenetére
Teasüti
#10613
üzenetére
Én kérek elnézést, nem akartam senkit megsérteni, és természetesen csak azokhoz szólt az előbbi, akik tudnának segíteni, csak valamilyen okból mégsem tették. Tele van a fórum mérnökökkel és műszerészekkel, reménykedtem, hogy valaki csak megszólítva érzi magát.
Érdekes ez a DBU, köszi a tippet, utána fogok olvasni, ez tényleg hasonló, mint amit én akarok, de nem pont olyan. -
válasz
tvamos
#10609
üzenetére
Úgy, hogy a hasamra ütöttem, és választottam egy értéket. Mivel írtam, hogy nem értek hozzá, nem tudom, hogy oda milyen ellenállást illik tenni, és miért, ezért azt sem tudom, miért baj, ha az R2 nagyobb, mint az R1. Próbálom egyedül megtervezni ezt a rendkívül bonyolult áramkört, mivel még mindig nem kaptam érdemi segítséget se itt, se a hobbielektronika topikban (értsd: egy hét alatt kb. 5x megkérdeztem, de mindenki csak átnéz a kérdésemen). Nem értem, talán derogál egy hozzáértőnek egy ilyen egyszerű feladatra válaszolni? Azt hittem erre való ez a fórum, de látom, hogy a "Mikrokontrollerek Arduino környezetben (programozás, építés, tippek)" topikban sokkal érdekesebb és relevánsabb téma az ólommentes forrasztás körüli vita.
-
-
válasz
Janos250
#10597
üzenetére
Az impulzushosszt hogy érted pontosan? Az analóg jelet úgy értem, hogy az adó és a vevő távolságát akarom megbecsülni a fogott infra jel erősségéből, miközben ugyanezzel a jellel adatot is akarok átvinni.
A receiver belső elektronikája mindent elkövet, hogy a bejövő analóg jelből tökéletes digitális jelet csináljon, és nagyon jól végzi a dolgát
, mert semmilyen anomáliát sem sikerül keresztül vinnem rajta, sem a négyszögjel kitöltési tényezője, se a vivőfrekvencia elhangolása nem okoz semmilyen elváltozást a kimeneten. Az impulzushossz (mármint a soros átvitel bitjeinek hossza) a jel erősségétől nagyjából függetlenül csak átviteli hibákat okoz, 500us-nál rövidebb impulzus (kb. 18 periódusnyi négyszögjel 38kHz-en) nem megy át, 2-3ms viszont már gondot okoz, ha nem küldök közben szünetet, túl hosszú neki. A kettő közt meg sima négyszögjel jön ki belőle.
Jelen pillanatban azon töröm a fejem, hogy sima ir tranzisztorral veszem a jelet, ami elé teszek egy high pass filtert, de az istennek sem találok kész rajzot hozzá, nekem kellene terveznem úgy, hogy láma vagyok az analóg elektronikához, segítséget meg nem nagyon kapok hozzá, pedig biztos lenne itt valaki, aki 5 perc alatt tudna rajzolni egyet...
Ha ez összejön, akkor vagy ez veszi a digitális jelet (vagy nem veszi, ha távol van az adó, ez lenne a cél), vagy csak simán analóg jelerősséget mérek rajta, miközben az adatot magát a vs1838 vevővel veszem. És amíg van új ötletem, addig nem adom fel. -
válasz
 robohw
#10593
üzenetére
robohw
#10593
üzenetére
"A másik, hogy kopasz diódákkal, tranyókkal kiépítesz egy saját rendszert."
Ezt is szeretném, mivel már kiderült, hogy egy ir receiver kimenetéről sehogy sem tudok analóg jelet levenni.
Egy erősítés (opamp) nélküli sima RC tagot kellene tenni a tranzisztor és a bemenet közé, csak nem tudom egyedül kiszámolni. Tud valaki segíteni egy kapcsolási rajzzal? Analóg áramkörökhöz nagyon láma vagyok"Amit itt kutyulsz, az véleményem szerint aligha fog eredményre vezetni."
Miért mondod ezt? Ez nekem hobbi. Máris volt eredménye a "kutyulásnak", szeretek tanulni, egy csomó mindent tanultam az esp8266-ról, amíg utána néztem a dolgoknak. Beleástam magam az ir és a serial (uart) protokollba, módosítottam egy library-t, kiegészítettem paritás ellenőrzéssel, meg frekvencia modulációval úgy, hogy működőképes maradt.
Bele fogom tenni a GCR kódolást is, mert azzal 1600baudos sebességet fogok tudni elérni, szemben pl a BI Phase Coding-gal, amivel elméleti szinten is legfeljebb csak 1000baud lehetséges (azzal a vevővel legalább is, amivel én próbálkozom).
Elnézést, ha zavarok a kérdéseimmel, sosem tanultam elektronikát, se programozást, csak autodidakta módon, és kizárólag azt kérdezem itt meg, amire hosszas kitartó guglizás és utánaolvasás után sem találok választ. -
válasz
Janos250
#10591
üzenetére
Ez nem ide vágó dolog, akkor lenne érdekes, ha nem csak 8+2 bit hosszan kellene tartani a szinkront, de itt byte-onként újra történik a szinkronizálás (minden küldött byte start bittel kezdődik, ami megszakítást generál), szóval a hiba tuti nem itt jön be. Már csak azért sem, mert teszteltem az átvitelt még 38kHz moduláció nélkül, sima ir tranzisztorral, és 4800baud sebességgel simán működött. A gond azután kezdődött, hogy bejött a képbe a VS1838 ir receiver, mert nem jöttek át rajta a bitek úgy, mint vártam. A túl rövid és a túl hosszú jel is zavarja, az elsőt még csak értem, de az nem tiszta, hogy miért zavarja, ha több 0 bit érkezik egymás után szünet nélkül, mert a dekódolásban semmi szerepe, a bitek dekódolását én végzem a fogadó oldalon, csak közvetítő szerepe van.
-
válasz
tvamos
#10587
üzenetére
Nem feltétlenül szívás a GCR (amúgyis szeretek programozni), de az adatlap szerint, amit linkeltél, van jobb megoldás is. A fig.7.-en látható megoldás kiküszöböli, hogy hosszú, megszakítás nélküli 0 bitsorozatok (burst) alakuljanak ki (bár ehhez ezen a sebességen az én vevőm lehet, hogy lassú).
Azt viszont nem értem, hogy miért baj, ha hosszú ideig tart egy impulzus? A NEC kód az adatlap szerint direkt egy 9ms-os burst-tel indít, hogy -ha jól értettem - a vevőnek legyen ideje beállítani a gain-t. Vagy inkább a hosszú szünetekkel van baj? Vagy azzal, hogy gyakran változik az impulzusok hossza és elmászik a gain?
Akkor viszont elvileg nem jobban kéne működjön magasabb bitrátán...? -
válasz
tvamos
#10578
üzenetére
Hát ha rászoknék, hogy adatlapot olvasok mielőtt egy egész napom rámegy a kísérletezésre, spórolhatnék magamnak egy kis időt.
"Maximum number of continuous short bursts/second 1800"
Ez meg is magyarázza, miért nem működik már 4800baud sebességgel a rendszer.Mondjuk az én vevőm nem tsop, hanem VS1838, arról nem lehet ilyen részletes adatlapot találni, ebben olyat találtam, hogy "output pulse
width min. 500μs", ami ha jól számolok 2000baud-os elméleti sebességet enged.Még ennyi kérdésem lenne, hogy miért írják a legtöbb helyen, hogy ellenállásokat kell rakni a Vcc és az OUT lábakra?
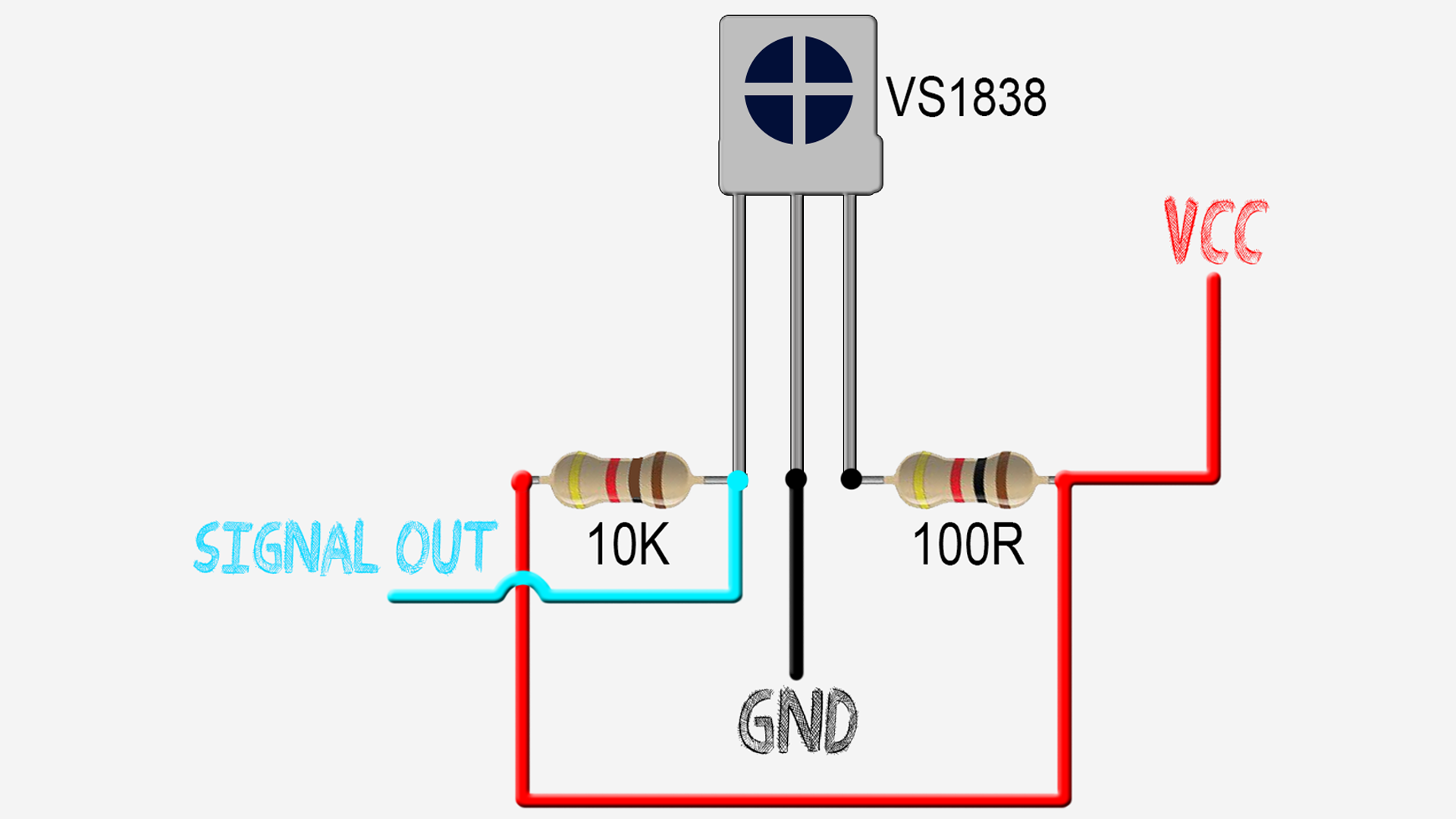
Kipróbáltam (a 10k helyett a belső felhúzó ellenállást használtam), de semmit nem befolyásolt a működésen, 100ohm nélkül sem melegedett vagy purcant ki... -
IR-kommunikáció témakörben előre léptem egyet. Átírtam az esp software serial lib-et, tettem bele paritás vizsgálatot és pwm modulációt, hogy 38kHz-es ir receivert tudjak használni.
A helyzet a következő: az analogWrite túl szép volt, hogy igaz legyen, valamiért használhatatlan, gondolom inkább hangfrekvenciára lett tervezve. Ezért kénytelen voltam a jó öreg "bit-bang" módszerrel (ha valaki tudja, hogy mondják ezt magyarul, megköszönöm, ha megírja ) csinálni, elég durva, de működik.
Ezután egészen váratlan dologgal szembesültem: egyrészt túl jó az adatátvitel hatótávolsága (10mA árammal 2m-ről simán tudok adatot küldeni), másrészt a távolsággal csökken az átviteli sebesség.
Sem a duty cycle, se a hordozó frekvencia durva elállítása nincs különösebb hatással a vételre, 5%-os kitöltés és 20kHz esetén sem csökken drasztikusan a hatósugár, létezik, hogy ezekben a kis vevőkben automatikus gain szabályozás van? Viszont az átviteli sebesség csökken, zavarérzékeny lesz a kapcsolat, és nem eltűnik az adat, hanem kicserélődik garbage-ra... És sajnos 1200baud-nál gyorsabban nem igazán működik. Az eredeti terv 4800baud lett volna, de ennél a sebességnél egy másik rejtélyes dolog történik: túl érzékeny lesz a vevő!
Viszont az átviteli sebesség csökken, zavarérzékeny lesz a kapcsolat, és nem eltűnik az adat, hanem kicserélődik garbage-ra... És sajnos 1200baud-nál gyorsabban nem igazán működik. Az eredeti terv 4800baud lett volna, de ennél a sebességnél egy másik rejtélyes dolog történik: túl érzékeny lesz a vevő!  Ha túl közel viszem az adót, megszűnik az adatforgalom és szemét jön csak helyette.
Ha túl közel viszem az adót, megszűnik az adatforgalom és szemét jön csak helyette. -
válasz
Janos250
#10539
üzenetére
Annyi minden alkatrész van már itthon, amit megvettem az évek során, de még nem használtam fel, hogy elsősorban azokból szeretném összehozni a dolgot.
Van pl. két wemos d1 mini-m, ami arra vár, hogy kikerüljön a dobozból. Van hozzájuk i2c motor shield is.Már ott tartok a dologban, hogy nem az ir remote protokollt fogom használni, mert nem praktikus, és ram-pocsékolás is lenne, hanem software serial-t, egy kis módosítással:
ebben a kódban a megfelelő helyeken kicserélem adigitalWrite(m_txPin, LOW );
sorokat erre:analogWrite(m_txPin, 512);Előtte pedig valahová beszúrok egy ilyet:
analogWriteFreq(38000);Jól gondolom, hogy ez úgy fog működni, ahogy én szeretném?
Azt meg tudod modani, hogy ha az analogWriteFreq-el módosítom a PWM frekcenciát, és egyébként nem használok PWM-et, el tud az állítódni magától (vagy nem magától, hanem valamelyik gyári lib-től)?
(#10535) tvamos: Köszi a szoftveres ötletet, ez jócskán leegyszerűsíti az elektronika részét a projektnek.
-
válasz
tvamos
#10535
üzenetére
Lesz még jócskán annyi kihívás ebben a projekben, hogy nehezítsem a saját dolgomat.
Egyébként most, hogy így mondod, lehet, hogy tényleg érdemesebb lenne először megnéznem a softwareserial lib-et, hátha tudom úgy módosítani, hogy egy tranyóval is működjön az egész. Mert én forrasztani sem szeretek, viszont az esp-vel még nem kötöttem olyan szoros barátságot szoftveresen, mint az uno-mega lapokkal... Ha nem lenne jóval több ram-ja az esp-nek, és nem akarnám wifi-n keresztül programozni, inkább egy nano-val csinálnám az egészet.
Ha nem lenne jóval több ram-ja az esp-nek, és nem akarnám wifi-n keresztül programozni, inkább egy nano-val csinálnám az egészet.Jó ide jönni, mindig kap az ember jó ötleteket!

-
válasz
Teasüti
#10530
üzenetére
Nem azt a linket.
Amit a kijelzővel kapcsolatban írtam.
Egy hobbiprojekthez elfogadható kendácsolás az i2c busz alacsonyabb feszültségre húzása, természetesen ha a megbízható működés alapfeltétel, vagy sorozatgyártásba kerül a készülék, akkor persze érdemes rendes szintillesztést beletenni. -
válasz
 Atamano
#10523
üzenetére
Atamano
#10523
üzenetére
Ha az LCD i2c vonalain nincs gyárilag felhúzó ellenállás, akkor működhet level converter nélkül is, úgy, hogy csak 3,3V-ra húzod fel a vonalakat! Ha az LCD elektronikája elfogadja a 3,3V-ot magas szintnek, akkor problem solved.
Egy 5V TTL szintű logika 2,5-3V feletti feszültséget már magasnak szokott értelmezni. Ha ez nem jön be, akkor marad a level converter. -
válasz
tvamos
#10509
üzenetére
Nincs ellenemre semmilyen működő megoldás, de 1db mosfet-tel hogy tudnám modulálni a soros port jelét a 38kHz-es hordozó jellel?
Igen, én is úgy akarom, hogy a táp és a kimenet közé teszem a ledet, máshogy nem is lenne jó, mert alacsony jelre kell, hogy a led világítson, a soros port és az ir vevő is low active. Inkább csak az a kérdés, hogy a standby láb is bírni fogja-e a 38kHz-es jelet, mert erre vonatkozóan nem látok infót az adatlapon, csak egy általános 100kHz-es limitet. Biztos nem gondoltak arra, hogy valaki kifordítva akarja használni. -
-
Persze, hogy nem okoz gondot, úgy kell összerakni.
A linkelt robot hidd el, minőségi anyagból van, ugyan nem Lego minőség (ami egyébként meg sem közelíti a 10-20 évvel ezelőtti anyagminőséget...), de majdnem ott van, és az általam eddig kézben fogott kínai Lego másolatokat magasan veri. -
válasz
 MineFox54
#10494
üzenetére
MineFox54
#10494
üzenetére
Azt nem írtad, hogy 0-10V közötti analóg jelet kellene küldeni. Ez alapján én is egy jól kiszámolt RC tag + tranzisztor megoldásra szavazok (plusz 10V-os táp) PWM meghajtással, de analóg elektronikai kérdésekben talán itt jobban tudnak segíteni.
(#10495) MineFox54: igen, ez jónak tűnik. V2 helyére menne az arduino kimenetről a pwm jel.
-
válasz
Teasüti
#10489
üzenetére
Miért, az usb vezérlő chip is csak egy mikrovezérlő.
Én ilyen dolgokat, ha nem otthon vagyok, a telefonommal szoktam megoldani, OTG kábel + kártyaolvasóval. Mondjuk én csak a telefonomban lévő SD-ről mentek pendrive-ra, de az elv hasonló.
Az említett raspi zero-nak van mass storage módja, amivel ha gépre kötöd, pendrive-ként viselkedik, ha meg hdd-t kötsz rá, meg lehet oldani egy automatizált script-tel, hogy át mentse rá a tartalmát, mindezt akár egy powerbank-ről. De ez itt eléggé off téma. -
válasz
 MrChris
#10487
üzenetére
MrChris
#10487
üzenetére
Én erre raspberry pi-t használnék. Egy zero kb. akkora, mint egy arduino nano, és nem sokkal drágább, mint egy eredeti uno board (használtan meg kb fillérekért beszerezhető). Hátránya, hogy kell hozzá egy otg usb hub, ami miatt némileg elveszíti a fenti méretbeli előnyét. Amúgy létezik hordozható hdd beépített sd backup funkcióval, az nem lenne jó? Vagy az építés a lényeg?
-
Ha jól értem, te olyat szeretnél, hogy legyen mellé még csomagolva valaki is, aki össze is rakja?
![;]](//cdn.rios.hu/dl/s/v1.gif)
Miért nem raksz össze saját tervezésű valamit? Az általad linkelt videókon még csak nem is Lego motorok vannak, szóval gyakorlatilag bármely, technic elemekből álló jármű alkalmas lenne a feladatra.
Ugyan nem Lego, és drágább is, mint 10ezer, viszont ajánlom neked ezt a Wall-e kinézetű robotot. Csak össze kell rakni (max 30perc) és egy remek grafikus felületen már lehet is programozni (legalábbis a 6 éves fiam már remekül boldogul vele) , Android vagy iOS alatt. Csak azért ajánlom, mert kettőt is vettem belőle a tavalyi akcióban, és fantasztikus minőségi cucc! Sajnos a látszattal ellentétben nem kompatibilis a Lego technic elemekkel.
Az első linkelt videó nagyon elgondolkodtatott, hogy minden eddigi lego motorizálási feladatnak rosszul álltam neki, mert az a nema8 stepper olyan, mintha maga a Lego találta volna ki, annyira illik a Lego mellé.
Asszem be is szerzek párat. -
válasz
tvamos
#10466
üzenetére
Találtam az uln chipeknél sokkal cizelláltabb megoldást a ledek meghajtására.
Van itthon TB6612FNG breakout boardom, ami egy dual H-bridge motor driver. Mivel a ledeket úgyis csak egy irányba lehet meghajtani, ez azt jelenti, hogy 4db ledet tudok rá kötni, az standby lábra pedig mehet a 38kHz jel, és kész is az infra meghajtású soros port.
Az adatlapja szerint 100kHz-ig lehet hajtani, és a minimum tápfeszültség 2,5V (ezért is rendeltem, ilyen van az arduino motor shield v2-n is, ami nagyon jól működik). -
-
Na úgy néz ki mégsem kell újra feltalálnom a meleg vizet.
Addig olvastam, amíg kiderült, hogy a mintának tekintett Lego Spybotics egyszerű soros kommunikációt használt, 4800baud sebességgel, 72kHz-es infra jelre ültetve, nem a távirányítóknál használt protokollt. Tehát elméletileg 1 hardveres + 2 szoftveres serial meg is oldja a 3 infra vevő egyidejű használatának problémáját. Legalábbis a lib leírása szerint az avr software serial-lal szemben az esp változatnak nem okoz gondot két példány egyidejű működése.
Ráadásul a küldés is leegyszerűsödik (legalábbis a kód része), és nem kell használnom azt a hatalmas és komplikált irlib-et, ami nem is kimondottan erre való.
Viszont ahhoz, hogy a soros kimenetet tudjam használni, kelleni fog egy AND kapu, vagy egy hasonló működésű logika + egy 38kHz pwm-met kell valahogy előállítani. -
válasz
tvamos
#10475
üzenetére
De én nem a visszavert jelet akarom dekódolni! Az egyik roboton lesz az adó, a másikon a vevő.
Ha különböző frekvenciájú ir vevőkkel különböztetném meg a robotokat, akkor nem tudnám bővíteni a rendszert, vagyis nem tudnék kettőnél több robotot építeni. Lehet, hogy nem is fogok soha, de azért a lehetőséget szeretném meghagyni rá. -
válasz
tvamos
#10472
üzenetére
"Hogy akarod a jelerosseget kiolvasni? Nekem ez nem ment. Vagy volt jel, vagy nem."
Hát mivel ahogy írod, analóg jelerősséget nem lehet mérni az ir receiver kimenetén, azt találtam ki, hogy fordítva ülök a lóra. A jeladó erősségét tudom (legalábbis remélem, hogy tudom valahogy) változtatni. Egymás után több kódot küldök, egyre csökkenő intenzitással és a küldött kódba mindig beleírom, hogy az éppen milyen erősséggel lett kiküldve. Úgy működne, mint a GPS rendszer, csak ott ugye az időkódot küldi a műhold és az eltérésből számolja a vevő a távolságot, én meg a jelintenzitást küldeném. A távolságot meg úgy lehet belőle kiszámolni, hogy ha a vevő oldalon sikerült a leggyengébb adást is venni, akkor az adó közel van (ehhez kéne valahogy elérni, hogy csak pár cm legyen a hatótávolság). Ha csak a legerősebb adást sikerül venni, akkor meg a szoba másik felén van az adó. A többi meg háromszögelés kérdése.
Természetesen tudom, hogy ezzel nem fogok tudni cm-es pontosságot becsülni, de ez az említett Spybotics rendszerben is csak úgy van, hogy az ellenfél közel van, távolabb van, vagy valahol előttem a távolban, az irányt is kb 30°-os pontossággal tudja megmondani, de ha nekem ilyen pontosságot sikerülne elérni, akkor már nagyon örülnék neki."Erzekeloket akarsz fejleszteni, vagy az eszkoz lemasolasa a cel, vagy mi az, amit szeretnel pontosan?"
Az eszközt szeretném lemásolni."Sharp tavolsag szenzor nem jo neked? Azzal tudnad a tavolsagot."
Tudom, hogy ilyen létezik, de nem jó, mivel nem egyszerűen távolságot akarok mérni, kódot akarok elrejteni a mérőjelben, amivel lehet azonosítani, hogy ki van előttem, esetleg még azt is, hogy felém néz és próbál bemérni, vagy éppen háttal van nekem. -
válasz
tvamos
#10466
üzenetére
Azt az ábrát sajnos nem tudom értelmezni.
Az ir remote lib-ben viszont láttam, hogy lehet duty-t állítani, lehet előbb azt fogom kipróbálni.
Az uln2003 csak úgy jött a képbe, hogy abból van otthon, nem kell venni. Az ir dióda meghajtásakor nem lenne probléma a feszültségesés, legfeljebb az előtét ellenállás számolásánál kell majd figyelembe venni.
De arra még mindig nincs ötletem, hogy hogy olvassak egyszerre 3db ir receivert. A 3 beérkező jel erőssége közti különbségből számolnám a jeladó irányát a vevőhöz képest. Van rá vmi ötletetek esetleg? -
Nem a dolog egyszerűsége, hanem pont a bonyolultsága miatt gondoltam.
Van a LEGO Spybotics rendszer, jó régi, az eredeti Mindstorms-szal egy idős. Az egyik tulajdonsága, hogy ha van két ilyened, meg tudják egymást keresni infra sugárzók és vevők segítségével, és le tudják egymást lőni. Gyakorlatilag lézerharc, robotokkal.
Érzékeli a másik robot irányát és távolságát. Hátránya, hogy nekem csak egyet sikerült szereznem, csak soros porton át lehet programozni, és csak egy fény és egy ütközésérzékelőt lehet rá tenni, ami eléggé lekorlátozza a lehetőségeket.
Na ilyet szeretnék csinálni, rögtön kettőt is, csak wifi-n keresztül lehetne őket programozni és több szenzort szeretnék rá tenni, amivel a külvilágot érzékelik.
Most éppen ott akadtam el, hogy az esp ir lib csak egy ir receivert fog támogatni, szóval erre kellene még kitalálnom egy multiplexert, amivel egy pin-re 3db ir vevőt rá tudok akasztani... -
válasz
tvamos
#10456
üzenetére
Megnéztem, de nem láttam sehol, amit írtál. Viszont adtál egy nagyon jó ötletet!
A fig.5 alapján, ha a vivőfrekvenciát elhangolom, csökken a vevő érzékenysége. Ha 38kHz helyett mondjuk 26kHz-cel küldöm ki a jelet, a vevő érzékenysége 20% alatt lesz. Jól olvastam a táblázatot?
Ezt nekem pont kapóra jön.
Erre gondoltál egyébként pwm alatt?
Nem avr, wemos d1 minivel szeretném, annak sajnos nem annyira terhelhetők a lábai, asszem 15mA a max. Szerintem az említett uln2003-al fogom meghajtani a ledeket, de csak akkora áramkorlátozó ellenállást fogok használni, hogy a LED ne menjen tönkre, így maximális lesz a hatótáv, és a frekvenciát fogom változtatni, nem az áramerősséget. -
A másik ötletem az uln2003-el vezérelt "DAC", a 38kHz-es jelet pedig egy fet-tel vagy egy tranzisztorral vezérelném. Ez talán életképesebb ötlet lenne, teljesítmény szempontjából mindenképp, de túl sok pin kellene hozzá, márpedig az egészet egy wemos d1 minivel szeretném irányítani.
-
Sziasztok! Szeretnék csinálni egy olyan infra távirányítót, aminek a hatósugara szabályozható, például legyen mondjuk 3m és 10cm közt szabályozható. Normál esetben az infra LED fényerejét pwm-mel szabályoznám, de mivel itt eleve 38kHz-es jelet kellene pwm-mel modulálni, eléggé működésképtelennek láttam a dolgot.
Kitaláltam egy 4 bites DAC megoldást, ami egy 74hc595 chip 4 kimenetére kötött ellenállásokból áll, amiket párhuzamosan kötnék a LED egyik kivezetésére. Így megfelelően összeválogatva az ellenállásokat (pl 400, 200, 100 és 50 ohm) kb. 15 különböző áramerősségi szintet tudnék vele előállítani. A digitális jelet pedig a 74hc595 enable lábával tudnám küldeni.
Szerintetek működőképes az ötlet? Mekkora áramerősség kell egy infra LED-nek, hogy 3m-re tudjon sugározni? Ahogy utána olvastam, akár 1,5A is lehet pillanatnyi áramfelvétele (ennyit ír az adatlapja), tehát gondolom ennek oka van. A 74hc595 viszont 30mA-t enged a kimeneteken, és max. 70mA lehet az egész chip max árama. Mire lehet ez elég?
Ki fogom egyébként majd próbálni, de gondoltam előbb azért kikérem a véleményeteket.
Esetleg van valakinek jobb ötlete? 74hc595 és uln2003 (darlington array) chipjeim vannak itthon, azért ezekben gondolkoztam.
Köszi! -
válasz
 Victoryus
#10418
üzenetére
Victoryus
#10418
üzenetére
Hogy jön a szervó motor a motor shield-hez? A motor shield v2-n lévő szervó csatlakozók ha jól emlékszem csak az uno bizonyos pin-jeit (D9,D10) duplázzák meg úgy, hogy van mellette 5V meg GND, tehát nem a rajta lévő chip vezérli, amit i2c-n tudsz elérni, hanem a megfelelő pin-eket össze is kell kötni, és kell egy servo library is, ami wemos kompatibilis. Ha wemos-ra kötöd az uno shield-et, gondolom jumper kábelekkel, akkor bármelyik szabad pin-t rákötheted. Esetleg a digitális kimenet logikai szintje okozhat gondot, hogy csak 3v3, de szerintem a legtöbb szervónak ez elég.
Ja és persze kell neki kívülről 5V táp.
Úgy is mondhatnám, hogy szervó vezérléshez egyáltalán nincs szükség a motor shield-re, csak praktikus a csatlakozó miatt. -
válasz
 szuszinho
#10401
üzenetére
szuszinho
#10401
üzenetére
A Vin bemenet mögött van egy 5V feszszabályzó, minimum 6,4V-ot kell rá adni, hogy stabil 5V-ot kapjon róla a lap. Akkor kell használni, ha 6,4-12V közti tápot szeretnél használni. Az 5V bemenetet nem védi semmi, vigyázz, hogy magasabb feszültséget, stabilizálatlan tápot be köss rá.
-
Egy fokkal érdekesebb téma, hogy egy ilyen vezérlővel, csupán két output pin felhasználásával megoldható két darab egyszerű (szénkefés) motor meghajtása, némi kompromisszum árán akár több sebességfokozatban is (microstepping használatával).
Kaptam egy marék ilyen vezérlőt, és elkezdtem gondolkodni, hogy mire lenne még jó stepper meghajtásán kívül. Akkor találtam ezt a jó kis leírást, hátha jól jön még egyszer valakinek. Vagy csak mint érdekesség. -
válasz
 Attix70
#10221
üzenetére
Attix70
#10221
üzenetére
Általános, nemzetközi fórumokon érvényes íratlan szabály, hogy ha kérdezek valamit, megpróbálom a lehető legpontosabban leírni a probléma körülményeit, valamint azt, hogy eddig mit tettem a megoldás érdekében.
Ha a fenti információkat helyettesítem egy "nekem ez a szakmám, hogy képzeled, hogy tévedek?!?" kártyával, akkor pedig nem csodálkozom, ha ez másokból ellenérzést vált ki.
-
válasz
 Amarton
#10215
üzenetére
Amarton
#10215
üzenetére
Én ugyan nem vagyok villamosmérnök, de azt tudom, hogy feszültséget két pont között szokás mérni. Jelen esetben a chip a 0.1Ohm-os ellenállás két sarka közt méri az ellenálláson eső feszültséget.
Ha te az in+ bemenet feszültségét akarod mérni, akkor a chip mihez képest méri azt? A saját tápjának a GND-hez képest?Mellesleg a kérdésedhez nem mellékeltél diplomamásolatot, hogy kikérd magadnak a gyanúsítást, hogy nem értenél a dolgodhoz, és mivel a topikba nem csak villamosmérnökök szoktak írni, így nyilván első az, hogy kizárjuk az emberi tévedés lehetőségét. Kérek engedélyt meghunyászkodni.
-
válasz
 zsolti_20
#10085
üzenetére
zsolti_20
#10085
üzenetére
Megvizsgálod, hogy a három alapszín értéke kb. egyforma szinten legyen (valamennyi tűrés mellett). Ha ez teljesül, akkor el kell dönteni, hogy a szürke 50 árnyalata közül melyikkel van dolgod.
Meghatározol egy-egy treshold szintet a fehér és a fekete számára, ami alatt feketének, és ami fölött fehérnek veszed az érzékelt színt.
Pontosan minek a színét szeretnéd mérni és milyen körülmények közt? Ezt azért kérdezem, hogy a környezeti megvilágítást ki tudod iktatni a mérés során teljesen, vagy nem?
A mért felület mennyire fényes vagy matt? Mert a csillogás is eléggé félre tudja vinni a mérést. -
válasz
 LógaGéza
#9962
üzenetére
LógaGéza
#9962
üzenetére
Az általad linkelt relé modul már eleve tartalmaz minden alkatrészt, ami a relé meghajtásához kell, ellenállást, tranzisztort, mert ugye direktben nem lehet relét kötni egy kimenetre, tehát nem kell már oda semmi más.
Tápfeszültségben egészen 6,4V-ig le lehet menni, a regulátornak legalább 1,4V-tal kell magasabb tápfeszültség, mint amit a kimenetén előállít, tehát akár a 7,5V-os táp is bőven elég lenne, a melegedés és a veszteség is kevesebb lenne. -
válasz
LógaGéza
#9960
üzenetére
Bocs, már én is fáradt vagyok és hülyeséget írtam, kimenetekre természetesen nem kell felhúzó ellenállás, csak a bemenetekre.
Valószínű a 4 relé összes áramfelvétele miatt válik instabillá az UNO működése. Próbáld meg külön táppal a relé modulnak, és szerintem az UNO is kaphatna egy kisebb, 7-9V közti tápot. -
válasz
LógaGéza
#9957
üzenetére
"nincs közös testen semmi,"
Ezt fejtsd ki bővebben!" A relémodul egy ilyesmi, GND-t és 5V-ot, valamint a 4 PWM jelet az UNO adja neki,"
PWM a relé modulnak??
Az 5V-ot a relé tekercséhez az UNO regulátoráról veszed, miközben az UNO 12V tápot kap? Azon csodálkozom, hogy még nem durrant el a regulátor a terheléstől. Eredeti UNO, vagy kínai másolat? Utóbbiak terhelés nélkül sem nagyon bírják a 12V tápot, tartósan 9V körül lehet őket üzemeltetni.
A relét vezérlő lábakon van le- vagy felhúzó ellenállás? -
válasz
 adatfalo
#9956
üzenetére
adatfalo
#9956
üzenetére
A ReceiveText beolvassa a soros portról az oda érkező karaktert. Ha az a karakter "a", akkor az if ág működik. Ha nem az, akkor az else if ágban már nincs mit beolvasni, 0 byte lesz, ezért nem kerül oda soha a vezérlés.
A logikai hiba tehát az, hogy egyszer kellene a karaktert beolvasni a ciklus elején, mégpedig egy változóba, utána pedig egy switch-be tenném a lehetőségeket, az egymásba ágyazott else if -ek sora nem túl elegáns megoldás és tele van hibalehetőséggel. -
válasz
 Johnny_vT
#9942
üzenetére
Johnny_vT
#9942
üzenetére
Nekem smart car, mega board, néhány mikrokapcsoló, IR reflektív- és résopto encoder tárcsával a motorokra, UH szenzor, Bluetooth a vezérléshez.
Második projekt egy rfid kártyaolvasó Monopoly és Gazdálkodj okosan társasjátékokhoz.
Utoljára egy eredeti C64 billentyűzethez csináltam custom usb illesztőt pro micro-ból egy Raspberry Pi-hez (Retropie emulátort építettem egy eredeti C64 breadbox házból). -
"Ez a vágási ciklus. Az enkóder gyári értéke 100/fordulat, 200-ra lett gyorsítva áttéttel, 8 rpm-ről 16 rpm-re.
Egy lap kb 16 secundum, azaz 26-27 impulzus/sec. 1600 imp/min. 420-430 impulzus között lesz a szabvány 390 mm
0.91 mm/imp ezzel lehet számolni. 420 mm-es lap így kb: 460 imp."Ezt miért bonyolítottad ennyire el? Időből, sebességből saccolva számolod a távolságot. Miért nem a gép menetsűrűségét szorzod fel az encoder felbontásával? Akkor a "420-430 között lesz a szabvány" helyett tizedmm-re pontos adattal tudnál dolgozni.
-
Volatile egészen biztosan kell a megszakításban használt változókra, de nekem még gyanús ez a feltétel is:
currentpulse >= pulzus || voros
Én így írnám fel:currentpulse >= (pulzus || voros)
Nem vagyok pontosan tisztában a műveleti sorrenddel, ezért általában az indokoltnál több zárójelet használok, de elég sokszor okoz nehezen kideríthető hibát, így biztosra megyek.Vladi: az enkódert nem kell pergésmentesíteni?













 Viszont az átviteli sebesség csökken, zavarérzékeny lesz a kapcsolat, és nem eltűnik az adat, hanem kicserélődik garbage-ra... És sajnos 1200baud-nál gyorsabban nem igazán működik. Az eredeti terv 4800baud lett volna, de ennél a sebességnél egy másik rejtélyes dolog történik: túl érzékeny lesz a vevő!
Viszont az átviteli sebesség csökken, zavarérzékeny lesz a kapcsolat, és nem eltűnik az adat, hanem kicserélődik garbage-ra... És sajnos 1200baud-nál gyorsabban nem igazán működik. Az eredeti terv 4800baud lett volna, de ennél a sebességnél egy másik rejtélyes dolog történik: túl érzékeny lesz a vevő!  Ha túl közel viszem az adót, megszűnik az adatforgalom és szemét jön csak helyette.
Ha túl közel viszem az adót, megszűnik az adatforgalom és szemét jön csak helyette.

 Ha nem lenne jóval több ram-ja az esp-nek, és nem akarnám wifi-n keresztül programozni, inkább egy nano-val csinálnám az egészet.
Ha nem lenne jóval több ram-ja az esp-nek, és nem akarnám wifi-n keresztül programozni, inkább egy nano-val csinálnám az egészet.


![;]](http://cdn.rios.hu/dl/s/v1.gif)
















Új hozzászólás Aktív témák
 ekkold
ekkold- Keressek intel i7-i9!!
- Szép! Lenovo Thinkpad T14s G2 Üzleti "Golyóálló" Laptop 14" -50% i7-1185G7 4Mag 16GB/1TB FHD IPS
- Szép! Lenovo Thinkpad T14s G2 Üzleti "Golyóálló" Laptop 14" -50% i7-1185G7 4Mag 16GB/512GB FHD IPS
- Dell PowerEdge T110 II PC, Xeon E3-1220 v2 CPU, 32 GB DDR3 RAM, 2 x 1 TB SAS HDD
- Lenovo Tab M10 HD 64GB, Kártyafüggetlen, 1 Év Garanciával
- Xiaomi 14T Pro 5G 512GB, Kártyafüggetlen, 1 Év Garanciával
- Xiaomi Redmi 13 128GB, Kártyafüggetlen, 1 Év Garanciával
- Clevo 1060 6GB Mxm 3.1 laptop videó kártya ingyen házhoz szálitással
- HDTV HD010 kül/beltéri FULL HD/4K tv antenna / 12 hó jótállás
- magyar billentyűzet - 165 - Lenovo Legion Pro 7 (16IRX9H) - Intel Core i9-14900HX, RTX 4080
Állásajánlatok

Cég: ATW Internet Kft.
Város: Budapest

Cég: BroadBit Hungary Kft.
Város: Budakeszi