-

Fototrend
Ez itt, az elektronikával hobbiból foglakozók fórumtémája.
Lentebb összegyűjtötttem néhány elektronikával kapcsolatos, hasznos linket.

Új hozzászólás Aktív témák
-
#78964
 razorbenke92
őstag
Aryes
#78963
razorbenke92
őstag
Aryes
#78963
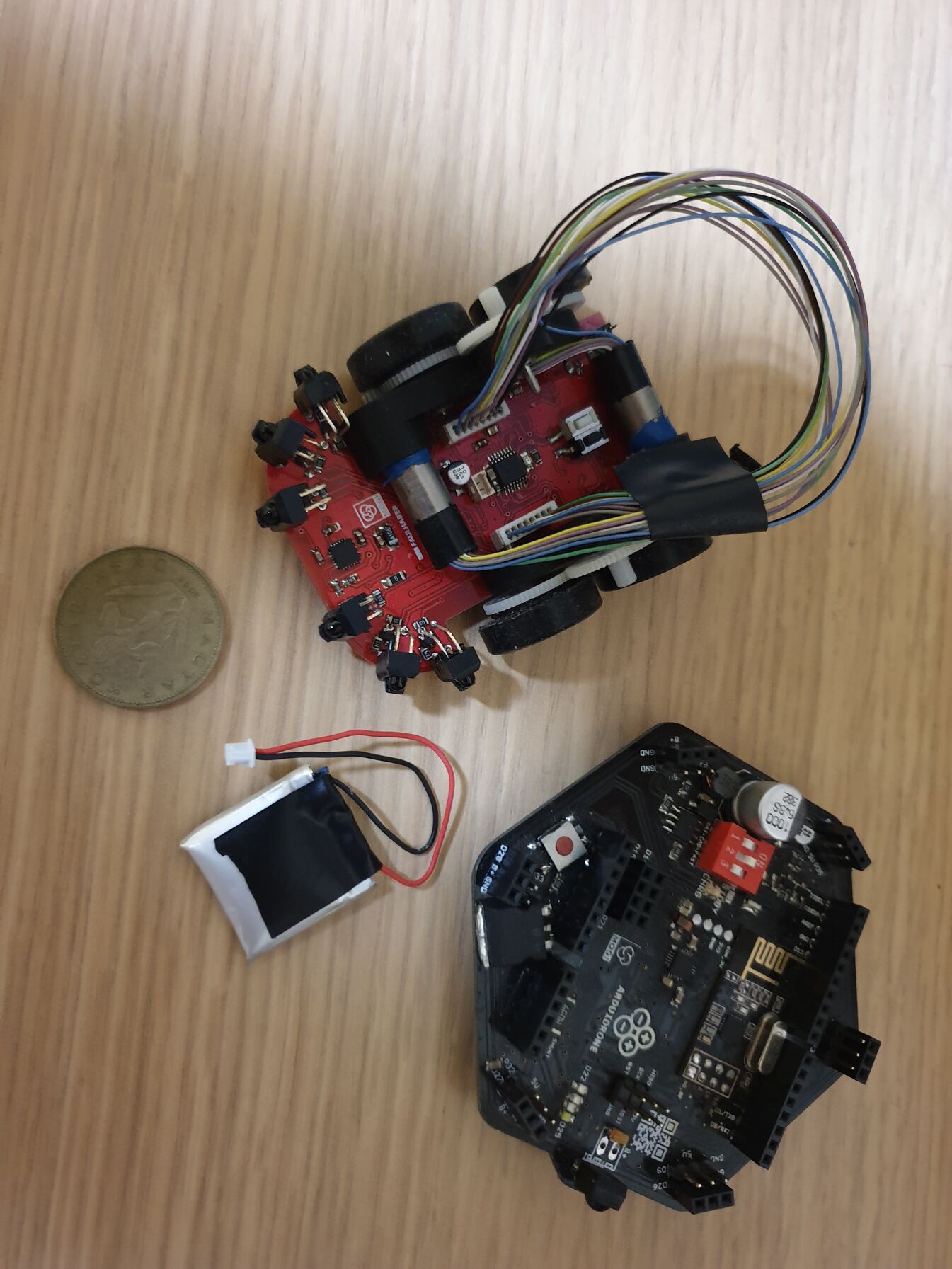
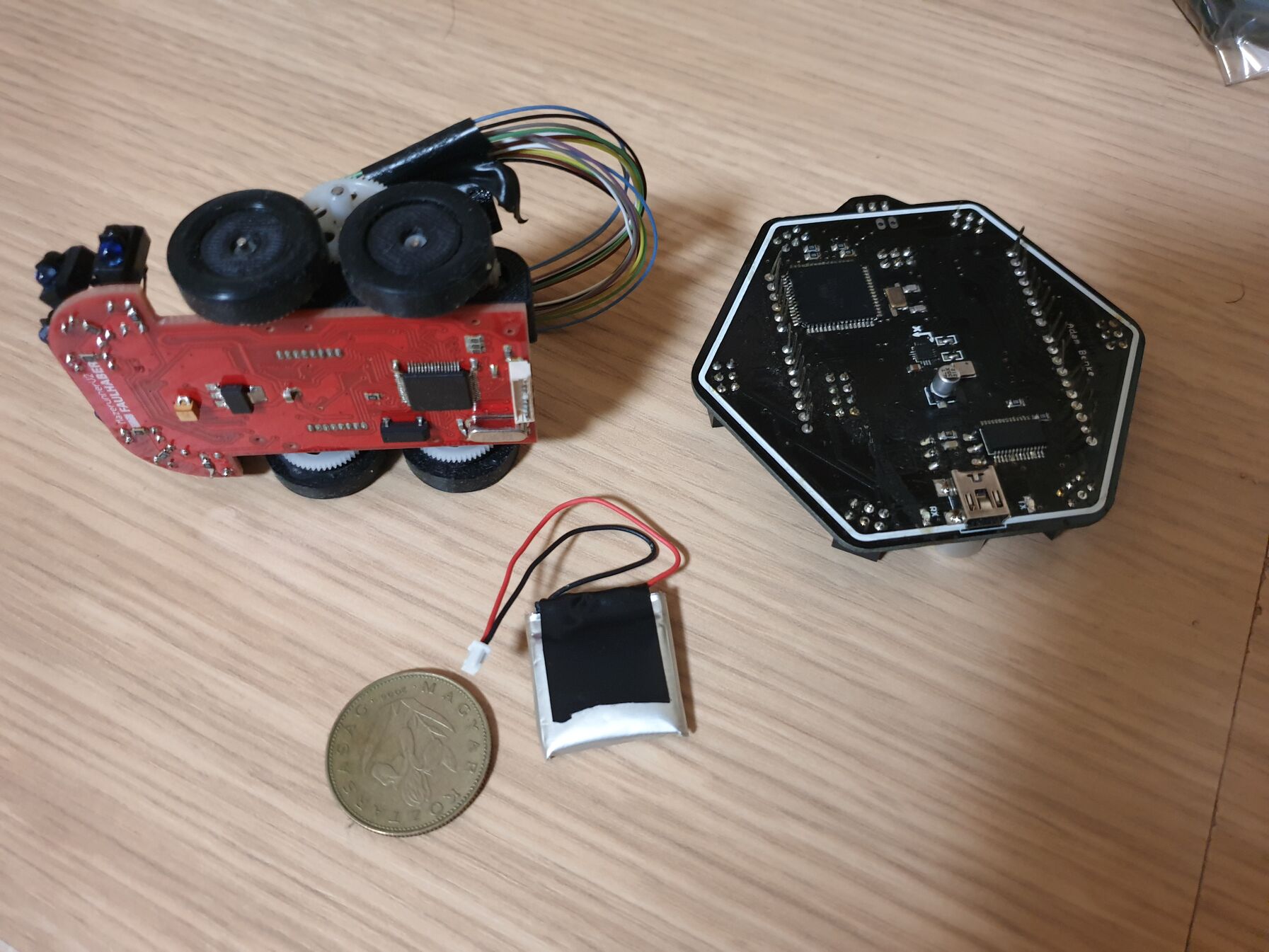
Éppenséggel pont itt vannak mellettem:
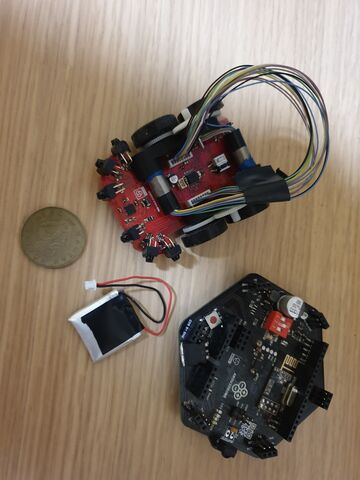

A piros a micromouse. A feladata, hogy egy labirintusban minél hamarabb megtalálja a "sajtot". IR szenzorokkal figyeli a falakat szabvány négyzetes cellákból álló pályán. A nagy kunszt, amit tudott a versenytársakkal szemben, hogy meg tudtuk valósítani a 4 kerekes mechanikát ÉS az enkóderrel korrigált telemetriát. Ez azért kihívás, mert a 4 kerekes konstrukciónál nem szoktak elférni az enkóderek a motornál. Ilyenkor teljesen a 6DOF MEMS-re van utalva a kicsike, ami veszélyes a mérés driftje és a döccenés miatt. Persze ez 4 keréknél kevésbé probléma, mint 2-nél. Az enkóder+giroszkóp szenzorfúzióval meg lehet nyomatni, csak a 2 kerék miatt pont az a tapadás megy el, ami kell az intenzív gyorsuláshoz és megálláshoz. Tehát a legjobb, ha mechanikailag is jól tud menni (4 kerék) de közben nem téveszti el merre jár (szenzorfúzió). A motor, amiben integrálva van a megfelelő felbontású és megbízhatóságú enkóder az 200-300Eur körül kapható. A teljes költségvetés 100Eur+támogatás volt.
Mi meg az esélytelenek nyugalmával bepróbálkoztunk a Faulhabernél, hogy ha van nekik raktáron ilyen belső enkóderes motor, akkor kölcsönadnák e míg megversenyeztetjük.
Válaszoltak, hogy nincs, de 5 héten belül legyártatnak 2db-ot raktárra. Svájcban. Meg is kaptuk, és sebességben körbeutaztunk mindenkit. Csak az útvonal elmentő algoritmussal nem végeztünk, így gyakorlatilag minden körben ugyanúgy újra megkerestük a célt. Egyébként meg az szokott lenni, hogy megtalálják, és utána a legrövidebb úton újra lefutják a pályát.
A motorokat azóta sem kérték vissza (pedig ezért nem lettek lerövidítve a vezetékeik).A fekete az Arduidrone HX névre hallgat. ATMega644 köré építve egy univerzális drónvezérlő. 10DOF, 38kHz IR vevő, 2.4GHz RF vevő, soros programozó, RC vevő interfész. Készültek hozzá különböző karok is, amikkel plug-and-play lehetett váltani 4 rotoros X,+,Y elrendezések között, vagy akár 6 rotoros elrendezést is tudott. A célja inkább oktatási volt, ezért van túlzsúfolva mindennel. Készült utána belőle egy kisebb, Q nevű négyszögletes kicsinyített és butított változat, de nem jutott túl a prototípus fázison, mert erre a célra meg már érdemesebb volt gyári flight controllereket venni.


Új hozzászólás Aktív témák
 ekkold
ekkold- Okos Otthon / Smart Home
- EAFC 25
- Azonnali alaplapos kérdések órája
- A Fehér Házban marad a Starlink Trump és Musk rossz kapcsolata ellenére
- Kerti grill és bográcsozó házilag (BBQ, tervek, ötletek, receptek)
- Macron betiltatná az EU-ban a közösségi médiát a 15 év alattiaknak
- Elfelejtettem a film címét
- Vezetékes FEJhallgatók
- eBay
- Kerékpárosok, bringások ide!
- További aktív témák...
- Samsung Galaxy A41 64GB Kártyafüggetlen, 1Év Garanciával
- BESZÁMÍTÁS! ASUS H170M i7 6700 16GB DDR4 512GB SSD GTX 1660 Ti 6GB KOLINK Observatory Lite TT 500W
- Bomba ár! HP ZBook Studio G5 - XEON I 32GB I 512SSD I Nvidia I 15,6" 4K DreamColor I Cam I W11 I Gar
- AKCIÓ! Sapphire Nitro+ RX 6800 XT 16GB videokártya garanciával hibátlan működéssel
- AZONNALI SZÁLLÍTÁSSAL Eladó Windows 8 / 8.1 Pro
Állásajánlatok

Cég: PC Trade Systems Kft.
Város: Szeged

Cég: CAMERA-PRO Hungary Kft
Város: Budapest