-

Fototrend
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-
delayMicroseconds(2); helyett 5-tel mér a plafonig is. Mivel totál üres a ház, szerintem nem lesz gond. Itthon a konyhában a lámpa , sarok bezavarja kicsit. 275-276 cm között ugrál, szalaggal mérve 275, tehát ez a része ok.
Másik kérdésem, hogy mire szoktátok ezeket a kütyüket felcsavarozni? Valamihez nem ártana rögzíteni, hogy 'terepen' is tudjam használni. Hol kapok én ilyen mini csavarokat? Esetleg lidl-ös ragasztó pisztoly ami még van itthon, csak később még használnám másra is a kütyüket...
-
Összeraktam a hardvert (Wemos D1 R2, ultrahang szenzor, TM1638)
Megírtam (összetallóztam) a programot. Az a baj, hogy 150cm felett eléggé pontatlan. Nekem meg 315cm-ig kéne mérnie. 2,75 a helységek belmagassága, de 40cm-t kell leásni az új aljzatrend miatt, no és ezt a plafonhoz lehetne mérni... Ez volt az elképzelés
Ez ennyit tud max, vagy hibás a program? 150-ig viszont baromi pontos szerintem, mérőszalaggal ellenőriztem. Mellékelem a csodaprogramot. A leírása szerint 2cm-400cm a hatótávja.#include <TM1638.h>
// define a module on data pin 8, clock pin 9 and strobe pin 7
TM1638 module(14, 12, 13);
// defines pins numbers for ultrasound sensor
const int trigPin = 5;
const int echoPin = 16;
// defines variables
long duration;
int distance;
void setup(){
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
//Serial.begin(9600); // Starts the serial communication ellenőrzésképpen
}
void loop()
{
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculating the distance
distance= duration*0.034/2;
//kiiratas
module.setDisplayToDecNumber(distance,0,true);
delay(100);
} -
#Tankblock: a 16 lábú ic sérteténnek tűnik
Most rádugtam a laptopra az ESP8266-os lapot, és ott sincs már port az eszközkezelőben. Valami gebasz van. 2 napja pedig az ment normálisan, írt neki portot is.
Akkor letörlöm az egész arduinót, újratelepítem, aztán meg lesz valami.
szerk: hoztam egy xiaomi teleontöltős kábelt, és van port minden lapnál... akkor ez a nyamvadék kábel a baj. Működik a Wemos lap is. Pedig ezzel arövid kis fehér kábellel használtam régebben, biztos megtört valahol.
Működik a Wemos lap is. Pedig ezzel arövid kis fehér kábellel használtam régebben, biztos megtört valahol. -
Kérnék egy kis segítséget. Van egy Wemos D1 R2 v2.1.0 lapom. Anno használtam már, akkor működött normálisan, majd a motorvezérlő elfülstölt. Most kéne a lap másra, ultrahangos távolságmérésre.
Kezdtem volna a sima led villogtatással, de nem bírok rá feltölteni programot. A laptophoz csatlakozik, a 3 kék led világít rajta, eszközkezelőben megjelenik com3, com4 port. Program feltöltésnél hibát ír az Arduino,
[kép]
Most elszállt benne valami hardver, amikor a motorvezérlő elfüstölt, vagy csak valami szoftveres gondja van?
Az Arduino-ban Wemos Lolin d1 r2 & mini eszköz van kiválasztva, de pórbáltam másikat is, ugyanezzel a hibával elszáll. Másik porttal is.
Eszközkezelőben azt írja a két portra a Win10, hogy Szabványos soros csatlakozás Bluetooth kapcsolaton keresztül. Ez is fura, mert másik lapnál nem ezt szokta.
A Wemos wifi-je be van kapcsolva, bluetooth-on nem látom. -
Szerintetek egy arduino uno, vagy esp32 elég erős ahhoz, hogy internetes rádiót streameljen fm transmitterrel? Lenne hozzá egy érintő kijelző is, ahol lehetne váltani a csatornák közt, mondjuk. Elég lenne 10 db rádió adó. Olyat láttam Youtube-on, hogy sima internetes rádió, hangszóróval, nekem az a része nem kell, adott a régi rádió, csak nagyon recseg már rajta minden adás.
B verzió, régi androidos telefonra csatlakoztatok jack-en egy fm transmittert... de az arduinós verzió izgalmasabb. -
#11626
 Victoryus
addikt
tonermagus
#11606
Victoryus
addikt
tonermagus
#11606
válasz
 tonermagus
#11606
üzenetére
tonermagus
#11606
üzenetére
szia! Esetleg bemutató, vagy cikk lesz belőle? Érdekes a téma.Én mindig attól félnék, hogy bent a tó/folyó közepén megy valami tönkre, és ki kell halászni a hajót. Sarkadon láttam ilyen modell hajó versenyt, az jó volt, ott nem a sebességre, hanem az ügyességre mentek rá.
Nálam most a lego kamionos projekt teljesen leállt időhiány miatt, de örülök, hogy a lánctalpas viszont működik továbbra is. Most volt nálam 1 hétig egy normál Lego EV3-as robot, azzal sok időt eljátszottam. Szerintem az arduinós ultrahangos szenzor jobb, mert oldalra is lát valamennyit. -
Így most megy véégre, baromi jó móka tankozni. Persze nem tökéletes, mert a két tök egyforma motor mégse az, így nehéz egyenesben tartani. Túl gyorsan se lehet vele csapatni, mert ledobhatja a lánctalpat. No, mindenesetre örülök, hogy megy egyáltalán.
 ja, meg csúnya is szegény jármű.
ja, meg csúnya is szegény jármű. 
Következik a teherautó... esp32-vel. -
Bocs, a tripláért, csak lejárt a szerk.idő: ha ráteszem a sensor shieldet, és arra kötöm be a tápot, akkor meg megy a wemos... Na ezt már totál nem értem. Akkor az nem a vin-en adja a wemosnak a tápot?
Ha berakom a szendvicsbe a motor shieldet, a wemos akkor is megy, csak akkor a motor shieldnek is kéne táp.
Mehetne mindkettő ugyanarról a tápról? Akkor megoldódna a probléma. -
Köszönöm.
Ha közvetlenül a Wemosra dugom rá a tápot (~8.4V teli cellákkal, most töltöttem) a gnd+vin-re akkor is csak villan egyet, és semmi más. Módosítottam a programot, mindhárom pint low-ra állítottam, usb-vel ok.
Csak azt nem értem, hogy a másik shielddel még ment... Lehet megsérült, mikor elfüstölt a másik motor shield? Ott 12,6V is lehetett teli aksival. -
-
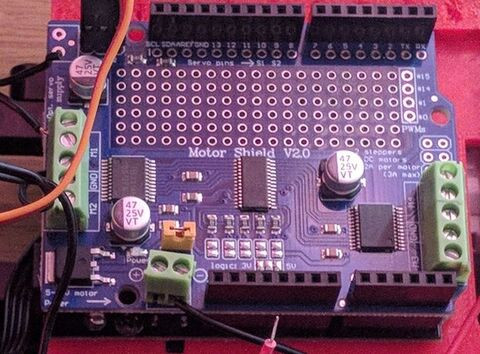
Megérkezett a motor shieldem pótlása, ugyanolyan, mint ami elfüstölt. Ezúttal csak 2db 18650-es aksival használom, így nem melegszik rajta semmi. Viszont van probléma. Már megint...
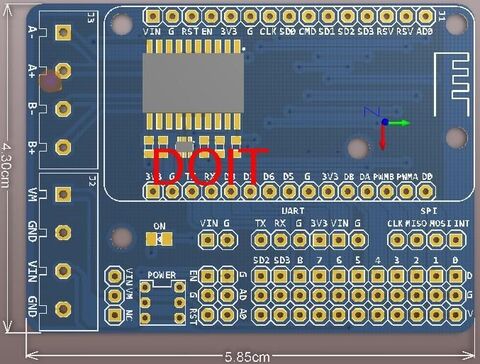
Szóval a réginél ha rajta volt a sárga jumper, amit most a piros téglalap jelöl a képen, akkor ellátta táppal a Wemos d1r2-őt is. Ha ezen rajta van a jumper, akkor csak felvillan a lap kék ledje amikor tápot kap, és ennyi. Raktam egy kapcsolót a pozitív kábelre, ami megy a motor shieldhet. A shield piros ledje világít, a lap nem megy.
Ha a Wemosnak adok usb-vel tápot, akkor megy, de nem mindig, illetve nem mindig ad wifit, csak ha lekapcsolom a motor shieldet. Ha nincs fent a kis jumper, ezt akkor is eljátssza. Tehát most igazából csak akkor tudom lefuttatni a programot, ha a motor shield nincs áram alatt, vagy nincs rajta jumper, és mikor már wifin kapcsolódott a telefonhoz, akkor adok tápot a motor vezérlőnek...
A kábelek forrasztva vannak, ragasztó pisztollyal szigeteltem őket, meg a fehér szigetelő szalaggal, de az nem marad a helyén. Nem szép, de szigetel.Kód. Én nem látok benne hibát, persze ez nem jelent semmit. Nagyjából ugyanaz a kódja, mint a réginek, csak ebben nincs servo, mert végül a lánctalpasba lesz beépítve a Wemos... 2db dc motor és ennyi, majd ha ez normálisan működik akkor még kap pár ledet.
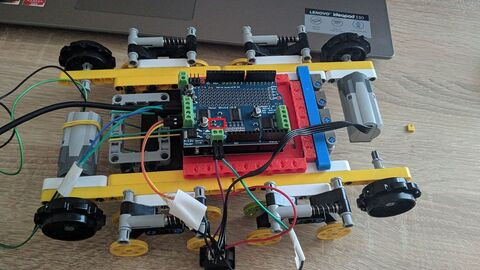
- Miért nem megy a Wemos a motor shieldről?
- Honnan adjak neki tápot a motor shieldről? Nem akarok még egy 18650-es aksit rátenni csak neki. -
Ha az összes kábelt lehúzom az esp32-ről, rádugok egy telefontöltőt, akkor meg elindul rajta a feltöltött program: megy a wifije, illetve ha laptopon van akkor meg a soros monitoron írja a kapott jeleket...
Lehet, valamelyik pin mégse szabad, és blokkolja az egészet ha be van kötve? Led villogtatós példával direkt végigpróbáltam az összes pinjét, és pin3-pin10 + másik sor pin5-pin15-ig mindegyikkel ment.
Azt még nem próbáltam, hogy mi van akkor, ha usb portról kapja az áramot a lap, és nem a VIN-en. -
 Megérkezett a forrasztó pákám, ennek örömére vettem 1uF kondenzátort, és ráforrasztottam a rövid lábát az esp32 gnd-ra, másikat meg az en gomb széléhez. Semmit nem változott a helyzet, csak bőgeti maxon az egyik motort, a wifije se megy. Ha usb-re dugom, és újra rámásolom a progit utána kikapcsolásig jó...
Megérkezett a forrasztó pákám, ennek örömére vettem 1uF kondenzátort, és ráforrasztottam a rövid lábát az esp32 gnd-ra, másikat meg az en gomb széléhez. Semmit nem változott a helyzet, csak bőgeti maxon az egyik motort, a wifije se megy. Ha usb-re dugom, és újra rámásolom a progit utána kikapcsolásig jó... -
válasz
 Victoryus
#11409
üzenetére
Victoryus
#11409
üzenetére
Közben találtam hasonló eseteket... Ez az esp-nek a balfaszsága, bentragad boot módban vagy valami ilyesmi... ráadásul hiába nyomja az ember az EN-t, akkor se indítja el a programot 10-ből 9x...
GitHubon azt írják kell egy ellenállás a föld meg az EN gomb közé. Ennyi szívást... biztos nem bíznék ilyen alaplapra komolyabb feladatot, még virágöntözést se. Gyárilag selejt tulajdonképpen. 

 Pedig már majdnem örültem, hogy kész. Én már kééész vagyok idegileg tőle.
Pedig már majdnem örültem, hogy kész. Én már kééész vagyok idegileg tőle. 
-
Igazából fingom sincs, mi volt a baja, de végül csak elindult. Előtte rebootolt vagy 50x...
Még volt logikai hiba, mert a fordulatszámokkal trükközni kell, hogy mindkettő talp előre/hátra mondjuk 0-200 között menjen. A 200 is gyors, és csak 50 körül indul.
Így ha usb-n van, akkor megy normálisan. Ha nincs, akkor viszont megőrül. Amint áramot adok neki, pörgeti az egyik motort maxon és ennyi. Flash közben is szokta, elég idegesítő.
Ha usb-n van, és újra rátöltöm a programot, akkor jó, olyan mintha akkor megkapná a jelet, hogy motorok off... Sőt, ha menet közben lehúzom az usb-ről, akkor is jó amíg nem áramtalanítom. Ezen a lapon nincs egy normális reset se, olyan mintha egyik gombja se indítaná újra. Talán sok ennek is a 3db aksi, elég meleg a motorvezérlő, holnap az egyik helyére beforrasztok egy drótot. -
Eljutottam odáig, hogy külön az udp jól működik, szépen átküldi a RoboRemo az adatokat.
Külön a 2 motor vezérlése is ok.
Együtt folyamatosan csak rebootol... Program
Hibaüzenet:[kép]így néz ki:

-
válasz
Victoryus
#11403
üzenetére
Rámértem egy lidl-ös elemtesztettel, 2,3V-ot írt... Aztán frissítettem 1000-re a frekvenciát, majd újra 30000-re és így most megvan a 12,5 V max az A motornál. Be van kötve az EN1 pin is. A motorvezérlő ráadásul ellátja táppal az alaplapot is, ezt eddig nem is vettem észre, csak most, hogy jéé, megy usb nélkül is.
Viszont az még mindig nem tiszta, hogy az EN1 feltétlen kell neki? Nem lehet az In1,In2-vel szabályozni a fordulatszámot? -
[link]
Ezzel a kóddal próbáltam még, de a motor meg se mozdul. Próbáltam az EN1 pinnel is nyilván kommentet kiszedve, gpio14-es pinnel, akkor se.
Az l293d-n a ledek szépen mutatják az állapotot, meg a serialon is írja, éppen mit csinál. De amint rákötöm a motort, a ledek kialszanak rajta, és ennyi.
Magában a motor már 1db li po cellával is megy. Sok neki a 3 cella, és lekapcsol az elektronika? Vagy mi a bánat lehet vele? Hát a Wemos-szal is ugyanezt a motorvezérlőt teszteltem 3 lipo cellával, és azzal ment.#gyapo11: Banggood... Én forrasztó pákát rendeltem tőlük, akkor eu raktárt írt, 8-10 napos szállítással. Miután kifizettem, már cn-ből jön, nyomkövetés nélkül, immár 35 napja csak jön jön jön.
-
Ugyanabba futottam bele, mint a Wemosnál is, hogy az udp példáknál a router adatai kellettek volna, nem AP-ként üzemel a lap. Végül azt megoldottam, megy a korábbi kóddal. Sokkal jobb a wifije a DoIt-nak, mint a Wemosnak.
Utána újabb problémába ütköztem, ESP32-nél nincs analogWrite, de végül találtam pwm-es példát. A led fade ok, a motor vezérlése még folyamatban, nem teljesen értem a kódot. A resolution miért 8? Amit tippeltem azért?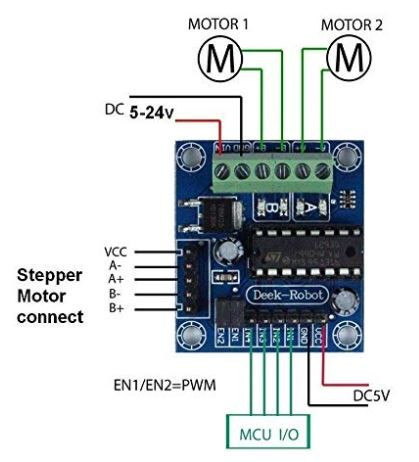
L293d motorvezérlővel menne a 2 dc motor. Nekem kell az en1 meg en2, vagy menni fog a jumperrel? Tulajdonképpen a jumper ebben az esetben alapból engedélyezi a motorokat? Van másik fajta leírás, ott engedélyezést ír az ábra, ezen meg pwm-et. De a Wemos-szal mikor az analogWrite-tal teszteltem akkor simán az in1,in2-re adtam a pwm értéket.
Akkor ebben az esetben pl.: ledcWrite(0, 100); Nyilván a 100 helyett majd kap egy változót udp-n keresztül.
Éjjel valamit írtam még, de nem ment a motor, csak a ledek villogtak a vezérlőn. Nincs még összeforrasztva a motor a kábelekkel, lehet simán nem érintkezett. Nem a builtin leddel teszteltem, hanem a gpio 13,12-vel.// the number of the LED pin
const int ledPin = 2;
// setting PWM properties
const int freq = 5000;
const int ledChannel = 0;
const int resolution = 8; //Ez itt miért 8? Arra tippelek, hogy 2^8=256, és ennyi lesz a fordulatszám tartomány
void setup(){
// configure LED PWM functionalitites
ledcSetup(ledChannel, freq, resolution);
// attach the channel to the GPIO to be controlled
ledcAttachPin(ledPin, ledChannel);
}
void loop(){
// increase the LED brightness
for(int dutyCycle = 0; dutyCycle <= 255; dutyCycle++){
// changing the LED brightness with PWM
ledcWrite(ledChannel, dutyCycle);
delay(15);
}
// decrease the LED brightness
for(int dutyCycle = 255; dutyCycle >= 0; dutyCycle--){
// changing the LED brightness with PWM
ledcWrite(ledChannel, dutyCycle);
delay(15);
}
} -
#Aryes: ok, köszönöm! Hát igen, saját hibáiból tanul az ember.
Most megint bele is futottam... Előszedtem a DoIt Esp32-őt, ez menne a lánctalpas járművembe, 2 dc motort kéne csak neki meghajtani a mini motorvezérlővel, de nem megy rajta az udp. A wifis résszel kezdtem, még nincs rákötve semmi. Egyik udp példaprogram se megy, azokkal egyszerűen nincs wifi.
A sima wifi példák szépen mennek, tcp-vel például lehet kapcsolgatni a builtin ledjét, megy a wifi hálózatok scannelése is.
Amikor be van állítva egy alaplap az Arduinós programban, akkor annak a példáit mutatja nem? Az összes pinje megy, led villogtató programmal végigmentem mindegyiken egyesével, jó a kiosztás, a builtin is az, a wifije is jó. Mire nem gondoltam megint?
Olyan, mintha az udp-s osztály lenne rossz, hiába importálja. Hibát nem dob az arduino, simán feltölti rá bármelyik példát. -
válasz
 Tankblock
#11393
üzenetére
Tankblock
#11393
üzenetére
[link]
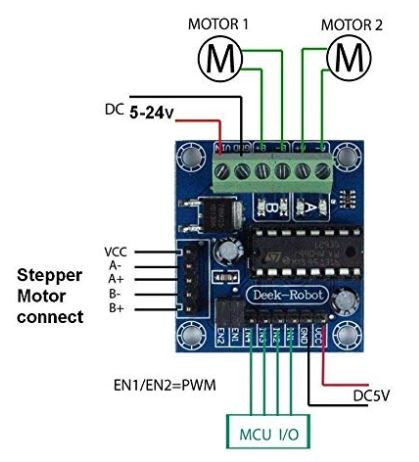
Egy ilyen motorvezérlő adta meg magát. Wemos d1r2-vel használtam. Pont azért lenne jó, mert ez tud tápot adni a Wemosnak/Uno-nak is, nem kell külön bajlódni vele. 1db dc motor volt rákötve, először a bal oldali 1-es csatlakozóra, aztán az kinyiffant, majd a 3-asra, de az is kinyiffant. Utána csak annyit csinált, hogy tűzforró volt rajta a két chip, ma a jobb oldali frankón füstölt is. Usb kábel nem volt bekötve, mert már telepítve volt a program.
Tömören: távirányítós autó lego alapokon (1dc+1szervo), lenyestem a koppincs motor csatlakozóját, be lett kötve a motorvezérlőbe. A teszt idején nem is használtam ki a maximális sebességét. Kb. 2 kört ment, az kb 10m összesen.
Távirányító wifin, udp-vel csúszkával küldi az értékeket. (RoboRemo app) -
válasz
Tankblock
#11391
üzenetére
Ilyenem volt 4db, de már elpasszoltam rég őket.
Hát, ha nem füstölt volna el az a motorvezérlő akkor nem lenne megint probléma... Lehet, hogy sok volt neki a 3x18650-es cella, bár mentségemre legyen mondva nem voltak fullra töltve. 12V van ráírva, de 25V-os motorokat is meghajt... ez nekem nem tiszta. "4 H-Bridges: per bridge provides 0.6A (1.2A peak current) with thermal protection, can run motors on 4.5V to 36V DC"
Ma még utoljára kipróbáltam, de füstölt a jobb oldali motorokat vezérlő chip... Megnéztem mégegyszer Alin, szerencsére nem 4$ volt csak 1,8. Rendelek... csak ezt megint kivárni amíg ideér... A Wemos megúszta. A kész járműben már csak 2 aksi lett volna, de nem ért ide a 2-es tartó ezért használtam a hármast... kár volt. Ez az Ali hátránya, hogy nem bírja az ember kivárni az alkatrészeket.Van még egy power bankom, egyelőre azzal fogom használni a Wemost, plusz adok külön tápot a motorvezérlőnek. Csak ez így túl sok helyet foglal.
#Aryes: A szervóra visszatérve: az kavart meg, hogy a motorvezérlőhöz tartozó példakódot használtam fel, ami tudja a szervo adott fokra állítását. Nem kell mindig visszaállítani 0-ra, simán megérti hogy 60-80-90-60 fok, ahogy a távirányító küldi a jelet. Ha elengedem, csak akkor áll vissza alapállásba, és megy egyenesen a gép. De akkor nyugodtan használhatom sima pinnel is ezeket az 'osztályokat'.
-
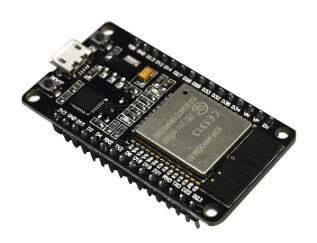
Van egy ilyen esp32-es lapom. Ezt mivel lehet meghajtani?
1db 18650-es akku elég neki? Usb porton keresztül, vagy a Vin 5V pinről is jó? Per pillanat nincs feláldozható usb kábelem, így nagyon örülnék ha elég lenne neki a pin-en keresztül... -
ok, köszönöm! Szét vagyok esve teljesen. Sokk volt most a feladat, meg a kocsit is meghúztam...
Az S-sorra kell kötni ráadásul nem a V-re... Így már megy a pwm is, meg az előre/hátra menet is.
Viszont az a gáz, hogy összesen 4 pin használható, az meg édeskevés. Ugyanott tartok, ahol 3 hónapja, sehol. Na jó nem sehol, mert legalább 2-3 kört már ment, meg van udp, wifi stb Még az jutott eszembe, hogy ez a Wemos tudna-e kommunikálni egy másikkal? Olyat még sose próbáltam. Ha igen, akkor a másikról mehetne a világítás vezérlés, esetleg csörlő/daru. Bár a forrasztó páka továbbra se ért ide, így a ledes része továbbra sincs megcsinálva.
szerk: megtaláltam, i2c-n keresztül lehetneIlletve van még kérdésem. Az ok, hogy így 2db dc motort tudnék esetleg vezérelni, de nekem 1 servo+1dc kéne. (van "c" verzió is, akkor lánctalpas lesz, annak nem kell kormány) Azt nem lehetne még valahová bekötni ezen a sensor sheilden? Illetve a servo része, pinjei még nem döglöttek meg a másik motor vezérlőnek, csak azt nem szívesen használnám már.
-
válasz
Victoryus
#11377
üzenetére
// Connection pins:
int in1 = 3; // IN1 zöld kábel
int in2 = 1; // IN2 kék kábel
//int pot = A1; // potentiometer middle pin to control speed of the DC motor
void setup()
{
Serial.begin(115200); //start Serial
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
}
void loop()
{
digitalWrite(in1, 50); //elvileg fordulatszám
digitalWrite(in2, 1); //elvileg az irány
delay (1000);Hogy lehet ebbe életet lehelni? Nem értem. Le kell venni az en1 en2 jumpert ahhoz, hogy végre a fordulatszámot is megkapja a vezérlő? Így az égvilágon semmit se csinál. Nem találok hozzá leírást.
-
Ennél a motorvezérlőnél be kell kötni az DC 5V-t is, vagy elég ha adok neki tápot?
-
-
válasz
 brickm
#11358
üzenetére
brickm
#11358
üzenetére
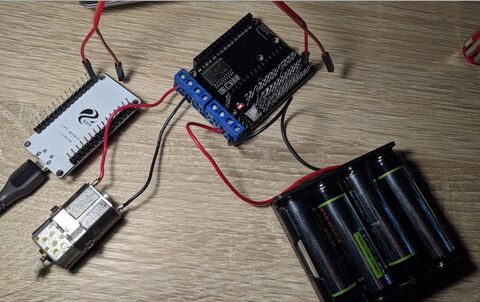
Így kötöttem be, látszik a képen, itt éppen áramtalanítva:
Nincs multiméterem. A motor koppincs lego M motor. 4 eres kábellel,amiből csak 2 van ráforrasztva. Úgy tűnik az 1-2-es kimenet teljesen döglött, 3-4 rendben. Elég is lenne az a 2, csak ne menjenek tönkre. A servo motor ok, meg a pinek is.
Nem vagyok kibékülve ezzel a motor shielddel, mert hiába húzom rá a csavarokat, akkor se fogja stabilan a kábeleket. Kis pénz, kis foci... avagy olcsó húsnak.. bár 4$-ért annyira nem is volt olcsó -
válasz
Victoryus
#11352
üzenetére
Korai volt az öröm... az M1. M2-re kötve semmit nem csinál a dc motor.
M3, M4-re kötve megy. Megdöglött az a 2 motor kimenete ezek szerint a shieldnek? Tegnap még jó volt, meg ma 2 körig. Kicsit strapabíróbbra számítottam. Tegnap azért nem tolatott, mert a földre kötöttem a motor egyik kábelét. De mondom, ma végre rájöttem, helyreraktam, ment is a hátramenet. Ez kinyírhatta esetleg?
Maximális fordulaton még nem is használtam, csak most a dc teszt programmal. Nem raktam hirtelen előre-hátramenetbe se. -
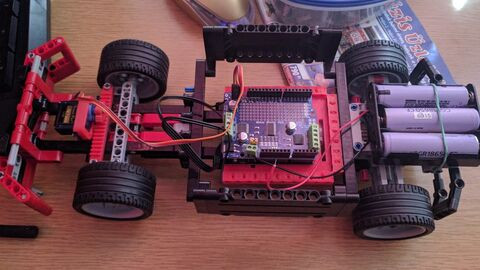
A távirányítós projekt heti állása: végre sikerült összehozni vele egy kört
Kb. ennyit bírt a servo-fogaskerék toldalék, elforog simán benne a servo fehér kis bizb@sza, hiába van odacsavarozva is... Egyelőre köt az epoxi, hátha tovább fogja bírni legközelebb. A kis sg90 úgy látom elég erős lesz. A dc motor is bírja váltó nélkül is.Továbbra is küzdök a 3d nyomtatott vackokkal. Az aksi tartóba nem találtam elektronikát csak Alin. Milyen néven futnak ezek itthon? Angolul battery pins. Holnap még benézek pár boltba, hátha van hasonló, ez a befőttes gumis felfogatás nagyon gagyi
de legalább tényleg tartja.
Az arduino tartó is kicsit nagy, de így akár szerkezeti elemként is használható.A fogasléc túl rövid, azt is újra kell nyomni majd módosítás után.
Tanulság: mielőtt szétszedi az ember a kábelezést, célszerű megjegyezni mi hol volt. A dc motor valamiért nem megy csak előre, bár azt szerintem nem lehet rosszul bekötni. Elég erős, gyors a járgány. Váltó is tervben van, de egyelőre marad így direktbe kötve, ezt a kasznit el fogja bírni.
-
válasz
Victoryus
#11292
üzenetére
A távirányítós projektem heti állása:
Megszívtam a forrasztópákával, mert eu-s raktárból rendeltem, de kínából jön, így még kb. 3 hét mire ideér. A 3d nyomtatás is lassabban halad a tervezettnél, mert hiába méretpontosak az alkatrészek a program szerint, a valóságban igencsak rájuk fér a csiszolás. Megint módosítani, újranyomtatni, városi könyvtárban meg nem kapkodják el a dolgot... Végül is ezelőtt sose foglalkoztam 3d modellekkel meg nyomtatással se, de tetszik
Folyt.köv. Lehet majd írok valami cikket belőle. -
#aryes: köszönöm! Tényleg van amit kifelejtettem. A föld a másik lábuk.
Szintén köszönöm!
Mondjuk nem haladtam most előrébb, mert a nyomtatott servo tartó nem passzol a Legóhoz, de azért elment vele egy csomó idő, szóval most megyek majd és nyomtatok másik fajtát. Az aksi tartó sincs még kinyomtatva. De ha már úgy is nyomtatni kell, akkor az uln2003-nak is nyomtatok valami tartót. Remélem kapható Csabán és nem 100x áron, ahogy a ledek. Ezért jöttek Aliról... -
Egy pin akkor tuti nem bír 4 ledet... Egyik tutorialban írják, hogy arduinon egy pin maximum 40ma-t tud, de esp8266 csak 12ma-t. Az meg nagyon kevés. Ejj...
Akkor külön táp kéne a világításhoz is ezek szerint?
Mondjuk ha a motorvezérlőt csapolnám meg...? 3 dc motor hely úgyis üres még, és legalább programozható is. Ha jól gondolom akkor az 2db 18650-es cella esetén max ~8.4V. Most még 3db-ról megy, de a végleges kiépítésbe csak kettőt tervezek hely/súly miatt. -
5mm-es, zöld/sárga/kék/fehér/piros... 100db volt 0,8$ Aliról, különösebben nem gond, ha pótolni kell őket. De eddig egész jól bírják a strapát. Az egyik kapott 5V-ot is, azt nem szerette.
-
válasz
Victoryus
#11275
üzenetére
Összeraktam az egészet, most úgy tűnik működik is. Végül a sokadik flash után újra kiírta az adatokat serialra... nem tudom mi gondja volt, ahhoz a részhez nem is nyúltam.
Hát, nem szép a kód, majd megpróbálom szétszedni több függvényre, de eddig nem sikerült.
Elnézést, ha valaki már nagyon unja a projektet...
Wemos d1 r2 rc car -
válasz
 vargalex
#11273
üzenetére
vargalex
#11273
üzenetére
Újraírtam csak az indexelést, így most tökéletesen megy: [link]
Leszámítva, hogy soros portra semmit nem ír ki.
Azt hiszem az volt a baja eddig, hogy amíg balra indexelek, addig a jobb oldalit le kell kapcsolni, plusz fordítva is. Nem volt lekezelve ez az ága a feltételnek. -
Igen, még mindig a Wemos D1. Ledeket mindig közvetlenül szoktam. Tudom kéne ellenállás is. Indexnél 2-2 led megy egy pinről, világításnál 4db.
A millis() led villogtató tesztprogram rendben megy, csak ha beleteszem a többihez akkor már nem megy. Tuti tele van programozási hibával is amit írtam, bár lefut. -
Van új probléma... próbálom belőni az indexelést, millis() segítségével. De valami gubanc van vele, mert serial-on hibát dob: ets Jan 8 2013, rst cause:2 vagy 4 boot mode
 1,6)
1,6)
A bal oldali indexek a gpio 1-en vannak, a jobb oldaliak a gpio3-on.
A jobb oldalira: ets Jan 8 2013, rst cause:2 vagy 4 boot mode1,7)
Erről nem nagyon találtam több infót... -
Minden Wemos D1r2 ilyen gagyi wifivel rendelkezni, vagy én fogtam ki? Nagyon sok a csomagvesztés... Udp helyett mi más jöhetne szóba?
Azt továbbra se értem, miért nem lehet a wifi beállításait átállítani. Hiába írom át az ssid-t, jelszót, csatornát, portot, tojik rá. Felülírás védett lett valahogy? Nem találtam rá magyarázatot.
Ha tcp-s példát flashelek akkor is maradnak a wifi adatok a régiek.
Nem lehet totál resetelni, hogy alapra álljon? -
Kész az alfa 0.5 verzió, működik is végre.
Valóban alacsony volt a feszültség, lemerültek a sok teszteléstől az AA aksik. Meg az a ~6V amúgy se volt sok. Átkötöttem a servo motort a motor shield servo csatlakozására, plusz adtam a shieldnek 3x18650 akkut. A koppcsincs Lego motor megy mint, az állat, pedig még nincs is maxon. Eddig azt hittem ez ilyen kis lassú.. hát nem csak éhes volt. A szervó is megy. Együtt is mennek végre.
Egy dolgot nem tudok még, hogy miért szakad meg gyakran a wifi, és miért nem változik meg sose az ssid/csatorna száma.
Plusz még le kell kezelni a kapcsolat megszakadását is, mert van amikor pont sebességadásnál kapcsol szét, és nem lesz szerencsés ha elszabadul a járgány. -
válasz
 Janos250
#11239
üzenetére
Janos250
#11239
üzenetére
Utánanézek a témakörnek. A servo motor sima Aliexpresses sg90.
Megy a servo a példaprogrammal, ahol csak fokokat adok meg, az a része ok.
Udp szerver + roboremoval is megy, kövei a telefon mozgását. De ha a dc motort is használnám, akkor van a gubanc.
Van a wemos r1d2, rajta a motor shield, rajta a sensor shield. -
Nagyjából összeállt a kód Erősen alfa verzió. Egyszer működött kb. Aztán ahogy gázt adtam a dc motornak, a szervo nem ment, a dc meg nem reagált. Van amikor a servo magától zúg, pedig nincs is hozzá csatlakoztatva még a wifihez a telefon se.
Ha bekapcsolom a dc motort, akkor úgy marad vagy el se indul, és nem reagál többet, pedig küldi a telefon az adatokat. A ledek működnek ekkor is. A servo hol megy, hol nem, leginkább nem. Ha megy akkor követi a telefon mozgását, kb 180 fokot fordul.
Külön-külön megy mindkettő a példa progikkal. Valamiért összeakadnak, vagy ilyesmi... Ha valakinek van ötlete, előre is köszönöm... -
A terv az, hogy csinálok hozzá saját androidos távirányítót is. Egyrészt, hogy fejlődjek kicsit, meg érdekel is. Ki kéne próbálni tcp-vel is... van még ebbe sok lehetőség. C-ét sose tanultam, anno még Pascal volt meg Delphi, utána php... meg egy kis JS. Kicsit nem árt beletanulni a C-be is. Átolvasom az udp, tcp, konvertálások referenciáit.
Ki akarom vinni szabadba is a járgányt, jó lenne 20-40m hatótáv.Van egy bluetoothos uno alapú 3 kerekű járművem is, de még nem próbáltam szabadban. Valamikor írtam arról is szerintem, meg kértem segítséget. Mindig szétesik bent is
Tudom, össze kéne forrasztani mindent, meg le kéne ragasztani, de akkor meg nem lehet szétszedni.
Ettől a Lego technic kamiontól is tartok, hogy nem lesz elég stabil. Jó kis összetett feladat... A servo motort még nem tudom hova tegyem... már így is totál át kellett építeni, a hátsó motorhoz is. Lehet jobban jártam volna ha eleve a motorokhoz építem a kasznit. DC motorral gondolom nem szoktak kormányt vezérelni. Problémás megoldani, hogy pont csak ~1,7 fordulatot menjen jobbra is meg balra is. -
válasz
vargalex
#11232
üzenetére
Most látom, hogy írtál egy új megoldást. Köszönöm!
Annyiból összetett, hogy a csúszka, giroszkóp az elé teszi a csatorna nevét, stringet küld, a gombok meg nem, azok float/int adatot küldenek. De akkor azt lekezelem valahogy.
Egyébként nem nagyon értem a packetbuffert. Ha a buffer mérete 4 byte, akkor abba hány karakter fér? Nem 4 hanem 5? Miért 5, mert van 0. eleme is?
Konkrét példa: csatorna neve abc és utána a csúszka ad értéket 0-240 között. A változatlan kódom ekkor lecsapta az abc-t, és átjöttek a számok 0-99 között. De az már 5 karakter hossz.
Még egy kérdésem van: a wifi ap nevét, jelszavát, csatorna számát miért nem módosítja, ha átírom a forrásban és újra feltöltöm? kb 20-ból 1x sikerült módosítani, akkor is a példatáras wifi ap programmal, nem ezzel amivel kísérletezek.
-
válasz
 DigitXT
#11230
üzenetére
DigitXT
#11230
üzenetére
Azért lett udp, mert gyorsabban reagál. Ha éppen reagál akkor tényleg... Fél méter sincs a telefon meg a Wemos között. Még esetleg másik wifi csatornával kipróbálom, hátha azért van ennyi csomagvesztés mert az alap 1-es telített. Bár csak 3 van rajta a 20 konkurens wifiből.
Egyébként nem jó az elgondolásom, mert a RoboRemo csúszkánál meg giroszkópnál se sima számokat küld, hanem el kell nevezni legalább egy betűvel az adott 'csatornát'. Szóval ha maradok az enyémnél akkor le kell vagdosni az első betűt, és utána számmá alakítani.
Ha Vargalex javaslatát követem, akkor meg nem tudom a sebességet átküldeni. Csak string-ként tudja fogadni a csomagokat, és utána abból kell kibányászni a számokat. -
-
válasz
vargalex
#11226
üzenetére
Köszönöm!
Érdekes, hogy a LED_BUILTIN a flashelős ledet kapcsolgatja, a gpio14 meg az sck feliratost. Ez jó, mert egyszerre tudok akkor két gombot+adattovábbítást tesztelni. Este nem tűnt fel.
Még most jön a neheze, mert a motorokat is kéne távirányítani. Az biztos, hogy lesz egy dc motor, amivel előre-hátra fog menni a járgány, a kanyarodást még nem tudom. Van servo motorom is, meg van dc motorom is. A dc az pont beillik átépítés nélkül, a servo meg pontosabb ahogy nézem. Egyelőre folytatom a dc motor irányításával. Egy csúszkával akarom szabályozni a sebességét és az irányát. Min érték -255, max 255, 0-val pedig megáll.
Tehát az elképzelés: 3 byte-ot küldene a RoboRemo.
Értékek: -255 - 255 dc motor sebesség, 256 első+hátsó ledek, 257 és 258 index, és a telefon elfordításával kormányoznám, mondjuk 500-600 közötti értékekkel.
Az ingyenes Roboremo 5 funkciót enged, ennyi pont beleférne. -
válasz
vargalex
#11223
üzenetére
Köszönöm, igen, a stringgel volt baja. Ha átkonvertálom int-be akkor végre belemegy a feltételek vizsgálatába. Hát, nagyjából működik, most jönnek a 0-ák maguktól is, ezt még pontosítani kell
Bár most lehet azért jön 0, mert az Y tengelyt is küldi a roboremo, és azokat az értékeket veszi 0-nak. Meg végül is felesleges 8 byte, elég lesz 1-2 is.
Megadtam neki végül fixen a gpio 14-et is, mert a builtin nem megy valamiért.
forrás
Halad ez -
válasz
Janos250
#11221
üzenetére
A sima led villogtató programmal megy a builtin led, Gpio14 egyébként.
De bele se megy egyik if-be se, nem írja ki a 'megjegyzéseim se'.
Maga a myData az egy string nem? Különben hibát dobna az if-nél. Itt most nem tudom hogyan tovább. A soros monitoron kiírja a led_on/led_off szövegeket.Vagy bele kéne tenni minden myData elemet egy tömbbe, és utána tömbelemenként vizsgálni? Csak akkor meg egy idő után nem fog 'betelni'?
A roboremo-s példában valahogy úgy van, hogy mindig feltölt egy 100 elemű tömböt, de nem látom át mit miért csinál... Plusz ott vizsgálja a csomagok első két betűjét a srác. Meg az tcp nem udp. -
Beüzemeltem az udp szervert. Az a gondom, hogy vizsgálom a csomag tartalmát, de nem kapcsolja ki/be a ledet a Wemos. A RoboRemo app szépen küldi a jeleket, a soros monitoron látom.
Forrás
Nem egyezik a típusuk? A myData lenne a tömb eleme. 8 byte-os az elemek mérete, de próbáltam 7-tel is, hogy pont olyan hosszú legyen mint a "led_on", akkor se ment.
if (myData == "led_on")
{
digitalWrite(LED_BUILTIN, HIGH);
}
Egyfolytában világít, nem kapcsol ki. -
válasz
vargalex
#11213
üzenetére
Ok, aztán már leesett...
Most kezdem akkor onnan, hogy legyen a Wemos az AP, és legyen rajta sima egyszerű web szerver. Ez most úgy fest működik is: pastebin link
Kiírja soros monitorra amit kell.
Ha pingelem a laptopról, akkor nagyon sok a csomagvesztése. Ez miért lehet? Ennyit bír a lap? A reakcióidők is nagy szórást mutatnak. -
Feltettem az udp teszt kódját a pastebin-re.
Ugye jól értelmezem, és a Wemos lesz a wifi AP? A gond az, hogy nem jelenik meg egyik eszközömön se a wifije.
Soros porton szépen teszi a pontokat egymás után másodpercenként.Ami még érdekesség: tcp-s példát is néztem, csatlakoztam a wifijére laptopon, és pingeltem. Elég sok csomagvesztés van. Kb. 10-15 csomag ok, utána 1 ok 1 veszít párszor, majd egy idő után megint 10 jó és így tovább.
A wifi scan példa viszont úgy látom nagyon sokáig fut látszólag normálisan.
Ha csak sima ap-ként ment, akkor bizonyos idő után eltűnt a wifije. 1 perc-2 perc után. Lekapcsolja energiatakarékosságból?u.i.: sta- tehát station mode? Akkor viszont ez piszkosul nem azt csinálja amit én gondoltam. Nekem olyan kéne, hogy a Wemos a wifi AP, az androidos telefon a kliens, és az küldi udp protokollon keresztül a jelet, monjuk RoboRemo appal.
-
válasz
Janos250
#11207
üzenetére
Nem ír ki semmit soros porton. A saját példái között is van udp, de azzal se. Maximum pontokat ír sorosra. A wifi nevét mindig átírom a programban, hogy lássam a változást.
Ami jól működik a wifis példák közül, az ap, ott kiír mindent soros portra is, telefon csatlakozik.
Teszt közben nincs fenn a wemoson semmilyen shield. Első lépésként nekem most elég lenne a beépített ledet kapcsolgatni wifin.
Tcp-s példák mennek rajta, de.elég sok a reakcióideje. Az udp-vel van valami baja. Ha sérült lenne.vagy hiányozna az udp könyvtár, akkor hibát írna ellenőrzés közben nem? -
Próbálok beüzemelni udp szervert a Wemos d1r2-re, de piszkosul nem megy. A saját példája se megy vele, meg amiket találtam a neten, azok se. Még csak a wifi neve se az, hanem amit 3 példával ezelőtt írtam be neki, amikor ap-ként teszteltem. Mi a bánatért nem csinálja? Most például ezzel próbálkozok, de semmi. Ellenőrzés lefut, fel is tölti a lapra. A laptopom szerint meg a telefonom szerint se változik meg a wifi neve, a serial portra se ír semmit.
-
-
Nem, koppincs kínai lego m motorok, sima dc motorok. A Nema8-ról most olvasok először. Nem rossz.
Azt nem tudom, korábban mit csináltam, de az biztos, hogy hülyeséget... visszanézve a hozzászólásaim. Szerintem nem a Wemos lábkiosztását próbáltam anno, hanem az uno-ét, a sensor shielddel se boldogultam akkor. Most meg megy. -
válasz
Victoryus
#11187
üzenetére
Több, mint 6 pin szabad, szóval úgy néz ki elég lesz

Bónuszként rátettem a sensor shieldet, mert úgy egyszerűbb lesz a ledeket bekötni, és működik az is frankón. No, most már csak a wifis/bluetoothos vezérlést kell megoldani, leforrasztani a lego koppincs motorokról a 4 erest, helyére sima 2 erest, majd mindent beépíteni a járgányba.
Ez se lesz egyszerű menet. -
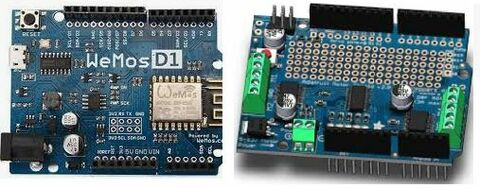
Megyek tovább másik vonalon, wemos d1 r2+motor shield. Valamikor régen írtad, hogy ugye rendben vannak a driverek? Nos, nem voltak, mert a motor shieldhez nem raktam fel anno. Most viszont igen, és vééégre sikerült a kis dc motort 4AA aksival elindítani.
Innen már lehet, hogy tovább tudok menni. Még azt nem tudom, hogy akkor tulajdonképpen hány szabad pinje marad a wemosnak, de valahogy majd kiderül. Elvileg a motorvezérlő csak 2 pint használ el. -
Volt egy kis időm így megpróbáltam összerakni egy esp32+NodeMcu ESP8266 Motor Shield Lua L293d -őt.
Háát, nem nagyon értem, hogy lehetne ezt működésre bírni. L298N-t használtam már, de annak több dolog is kellett a működéshez: pwm, motor a enable...
Ezen a L293d-n hova kéne bekötni egyáltalán az esp32-őt, meg hány pinnel? Alin annyit ír, hogy Control Port: D1, D3 (A motor); D2, D4 (B motor)
Ha feszültséget kap a D1, vagy D3 az ég világon semmi sem történik. Gondolom kéne még neki valami, csak ez nem nagyon derül ki sehonnan, hogy mi.Motorvezérlő:
-
válasz
Victoryus
#10432
üzenetére
Ott tartok, hogy nem tartok sehol... Fizikailag nem passzolnak össze az alkatrészek, túl szélesek a boardok a motorvezérlőhöz képest. Pedig egy típushoz valók elvileg...
Szóval most megint ugyanott vagyok, ahol 3 hónapja, hogy kéne valami motorvezérlő+lap ami kis helyen is elfér.Plusz rájöttem, hogy elég nekem két 18650-es akku is, nem kell 3, súly+helytakarékosság is szempont.
Aryes javasolta a lolin esp32-őt.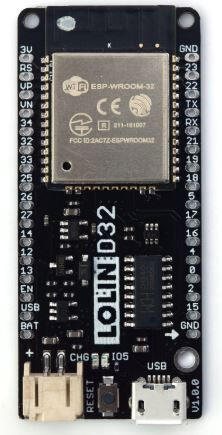
Abból is van már egy itthon. Akkor ehhez milyen motorvezérlőt rendeljek? (amit nem kell összerakni, forrasztani)Másik kérdés, ha már van ez a motor shieldem, azt hogy lehetne kideríteni, melyik lábaival lehet csatlakoztatni?
Ezt írtam korábban is, ha ráteszem a Wemos d1 r2-re akkor kb semmit nem csinál, és szabad pin is csak 2 marad... Lehet uno-val menne, de azzal még nem néztem.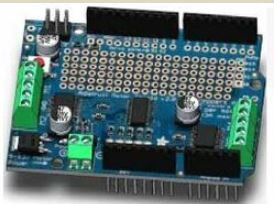
-
Azokat használom amiket a thinsversen találtam:
[servo adapter]
arduino tartó
Plusz kínai lego koppincs motorok, de valahol láttam sima noname motorhoz is. -
Köszönöm! Hát a D9 meg D10 az máshol van mint az uno-n.
Az elgondolás az volt, hogy a servo motor megy a servo1-es csatlakozóra, meg lesz még 1-2 sima motor. (vagy csak 2 motor, servo nélkül)
Lego alkatrészekből készült távirányítós teherautó a cél. A motorok direktbe az arduino motorvezérlőre kötve,mert nem lego motorok. 3d nyomtatóval majd lesz nekik keret nyomtatva.Plusz ledek, első körben ennyi, aztán tervben volt még okorsítani kicsit, mondjuk ütközés védelem, vagy sávkövetés. De úgy látom ehhez nincs elég használható lába.A wemos alapból tud wifit, meg bluetoothot, ezért lett volna jobb, de alig van szabad pinje. Van uno-m is bluetooth modullal meg L298N-nel, abból már építettem 2 motoros "autót".
A múltkor motorvezérlő nélkül már simán tudtam a servo motort irányítani wemos-szal wifin kersztül, de a másik két motornak csak kéne valami vezérlő... 3x3,7V lipo cellákról menne.
Lehet a L298N jobb választás ebben az esetben.
Jön még egy ESP12e+L293 shield hozzá, azok kisebb helyen is elférnek. Ez is szempont lenne. -
Wemos d1 r2 együtt tud működni a motor shield v2-vel? Egy servo motort próbálok életre kelteni a servo1-es csatlakozón, de nem igazán csinál semmit se. Vagy megint belefutottam abba, hogy túl sokban eltér az uno-tól a lábkiosztása...
-
#include <ESP8266WiFi.h>
WiFiServer server(80); //a szerver a 80-as portot figyeli
int LED_PIN = 2;
void setup() {
WiFi.mode(WIFI_AP); //access point
WiFi.softAP("Hello_IoT", "12345678"); //ssid plusz jelszó
server.begin(); //192.168.4.1
//Looking under the hood
Serial.begin(115200); //Start communication between the ESP8266-12E and the monitor window
IPAddress HTTPS_ServerIP= WiFi.softAPIP(); // Obtain the IP of the Server
Serial.print("Server IP is: "); // Print the IP to the monitor window
Serial.println(HTTPS_ServerIP);
pinMode(LED_PIN, OUTPUT); //GPIO16 is an OUTPUT pin;
digitalWrite(LED_PIN, LOW); //Initial state is OFF
}
void loop() {
WiFiClient client = server.available();
if (!client) {
return;
}
//Looking under the hood
Serial.println("Somebody has connected :)");
//Read what the browser has sent into a String class and print the request to the monitor
String request = client.readString();
//Looking under the hood
Serial.println(request);
// Handle the Request
if (request.indexOf("/OFF") != -1){
digitalWrite(LED_PIN, HIGH); }
else if (request.indexOf("/ON") != -1){
digitalWrite(LED_PIN, LOW);
// THE HTML document
String S = "HTTP/1.1 200 OK\r\n";
S += "Content-Type: text/html\r\n\r\n";
S += "<!DOCTYPE HTML>\r\n<html>\r\n";
S += "<br><input type=\"button\" name=\"b1\" value=\"Turn LED ON\" onclick=\"location.href='/ON'\">";
S += "<br><br><br>";
S += "<input type=\"button\" name=\"b1\" value=\"Turn LED OFF\" onclick=\"location.href='/OFF'\">";
S += "</html>\n";
//Serve the HTML document to the browser.
client.flush(); //clear previous info in the stream
client.print(S); // Send the response to the client
delay(1);
Serial.println("Client disonnected"); //Looking under the hood
}
}Ezt a példát tettem fel a Wemos-ra. Ha simán az url mögé írom (192.168.4.1/ON vagy OFF) akkor megcsinálj. OFF esetén bedobja azt a honlapot is, ami bele lett írva a kódba. De tetű lassú, ezzel hogy lehet egy autót távirányítani? Rég nekiment volna már bárminek, mire veszi a következő utasítást.
-
Wemos D1 R2-alapon készítenék távirányítós autót. Uno+bluetooth-tal csináltam már ilyet, de esp8266-tal még nem. Egyáltalán mivel lenne jobb: wifivel vagy bluetooth-tal? A wifinek nagyobb a hatótávolsága, így akár egy sportpályán is lehetne játszani. Telefonon keresztül irányítanám.
-
-
Ha van egy Wemos D1 r2-es lapom, meg egy SensorShield 5-öm, honnan tudom, hogy melyik kimenet mi?
Elvileg ez a Wemos lábkiosztása: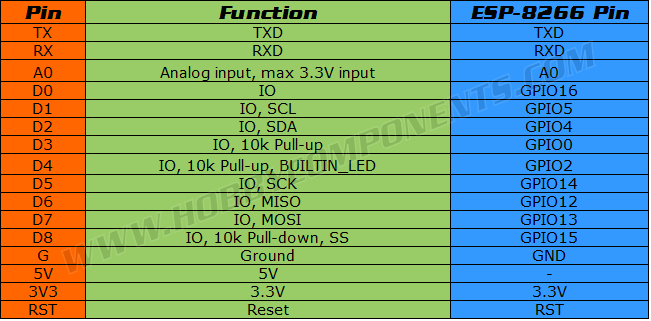
-
Lego-hoz keresek arduinót, amit lehet távirányítani. Most melyik ajánlott? Még mindig a wemos, vagy van már azóta jobb? (arduinos motorvezérlő lenne, 2-3 motor, plusz ledekhez kellene)
-
Azt meg lehet csinálni, hogy bluetoothon vagy wifin küldöm rá magát a programot, mint a Lego Ev3-ra?
-
válasz
Victoryus
#7544
üzenetére
Elnézést, hogy megint dupla, nyugodtan lehet törölni az előzőt! Jobban megnézve a wemos ábráját, leesett, hogy a 15-ös pin a tx láb. Ezért nem engedte feltölteni a programot. Most már jó! Elég fura a lábkiosztása szerintem, nagyon oda kell figyelni, a sima uno az nem ilyen volt, azt 'szoktam meg'. No majd valamikor folytatom tovább az ismerkedést vele, következő lépés wifin történő hőmérséklet lekérdezés. Azzal is szivatott fél órát, hogy d1-d8 stb van a lapra írva, pedig nagyon nem annyi az, ki kell keresni a gpio számát helyette.
-
Kérdezek mást. Az alaplapot úgy látom felismerte, ha meg eltűnik akkor újra be kell írni a http://arduino.esp8266.com/stable/package_esp8266com_index.json címet a beállításoknál, erre jutottam.
Adott a wemos d1 r2, és szeretném vele használni a dht-11 hő és páratartalom mérőt. Ennek a példaprogramját használom, de a wemosra nem lehet feltölteni, mert hibát ír:
warning: espcomm_sync failed
error: espcomm_open failed
error: espcomm_upload_mem failed
error: espcomm_upload_mem failed
A teszt előtte hiba nélkül lefut. Ugyanez a program működik sima uno-val és az esp32-vel is! Arra gondolok, hogy ezzel a szerencsétlen wemos-szal nem tud valamiért kommunukálni a cucc. 15-ös pint használnám. -
válasz
Victoryus
#7540
üzenetére
Nos, csak nem boldogulok. Letöltöttem az előző hsz-ban említett drivert az alaplap kezelővel. Ott is volt, hogy esp8266, fel is tettem a led villogtató programot. Nem villog, ha konkrét pint adtok meg, akkor se. De utána eltünt maga az eszköz a választhatóak közül, és az alaplap kezelőben sincs ott. Ezt megelőzően annyit írt az arduino, hogy frissítéseket talált. Most ilyenkor mi van?
Windows eszközkezelő látja (usb serial ch340 com3) -
Megint kérnék egy kis segítséget. Megjött a wemos d1 r2. (RobotDyn wifi d1 r2 esp8266 dev board 32m) Erre szeretném a led villogtató programot feltenni, de nem sikerül. Azt írja az arduino, hogy "A fatal error occurred: Timed out waiting for packet header" Esp32 dev modulnak tettem be. Vagy ez nem az? Én azt rendeltem.
Találtam megoldást, esp8266 leírás -
-
Végre megcsináltam a 2 kerekes autóm, bluetooth távirányítással. Egyrészt nagyon király, hogy működik, de sajnos nem sokáig működik. Valami mindig szétmegy, legtöbbször a bluetooth modul veszti el a kapcsolatot. De gyakorlatilag bármi bármikor, kereke leeseik, jumper kábel leugrik a helyéről... Tipp? Fixáljak le mindent folyékony ragasztóval?
-
ok, köszi! Rákötöttem a shield v5 soros portjára. A telefont engedi is kapcsolódni, de semmit nem reagál a robot. Próbáltam több alkalmazással is. (bluetooth rc controller, meg a bluetooth conroller) Az a lényeg, hogy nagybetűket küldök soros porton: F:előre, B:hátra, L:balra, R:jobbra, W:ledek be. Bluetooth terminál van a 2. appban, azzal se csiál semmit.
Ha usb-n van az arduino (bluetooth kihúzva) és a soros monitoron keresztül küldök neki parancsokat, akkor az működik. Ha bluetoothon keresztül, akkor meg semmi. (usb kábel kihúzva, arduino ki-bekapcsolva) -
A shield v5-öt szeretnék használni bluetooth hc05 modullal. A shield v5-ön van bluetooth foglalat, de annak mi a címe? Hogy érem el a rajta levő d0 d1 pint? Van rajta több d0 d1 pin is, mert a wifi csatlakozónak is az a neve.
-
Hátha belefut más is ebbe a problémába: végül arra jutottam, hogy ehhez a fajta 8x8-as led mátrixhoz az MD_MAX72xx könyvtár jobb. Ezzel már legalább balról jobbra megy a szöveg, de még nem tökéletes mert van amikor összecsúsznak a betűk. Amúgy nagyon király ez a kijelző
Lassan már 3 órája elvagyok vele. -
-
Megérkezett a hcmax7219-es 8x8-as led matrixom, 4db van egyben. Az a baj, hogy gyakorlatilag bármilyen példát nézek rá, mindet felülről lefele vagy alulról felfelé futtatja. Magyarul nem hosszában, ahogy kéne, hanem keresztbe. Van esetleg ehhez valakinek normális könyvtára/programja?
-
Próbálgatom a hc06-os bluetooth modult. Telefonra feltettem a bluetooth contorller appot, azzal terminálból tudok kapcsolgatni ledet. Gondoltam keresek valami szebbet, feltettem a RemoteXy-t. Az nem tiszta, hogy a telefonra hogy tölti fel a grafikus felületet? A lementett source code-ban van benne? A telefonra nem telepít semmit. Mondjuk egyáltalán nem akar kapcsolódni a bluetooth modulhoz se, pedig jó lenne ha nem terminállal kéne távirányítani.
-
Sikerült!
Ezt az esp32-es kis lapot lehet egyáltalán használni a shield v5-tel?
Másik kérdésem is van: Arduino uno-t lehet egyszerre használni a shield v5-tel meg a l293d sihelddel, vagy ezt benéztem és ha a motorvezérlő van rajta akkor már nincs lehetőség ultrahang szenzort meg vonalkövető infra szenzort plusz bluetoothot használni?
Ez a terv az unoval egyáltalán kivitelezhető? meghajtó motor+kormánynak motor, ultrahang szenzor(ok), vonalkövető szenzor, világítás a járműre (4 helyzetjelző+indexek+tolató lámpa stb), bluetooth távirányítás. Tehát ha nem távvezérelt, akkor mondjuk kövesse a padlóra ragasztott vonalat, de ha van alami akadály akkor annak ne menjen neki. -
válasz
Teasüti
#7216
üzenetére
Köszönöm. Tegnap odáig jutottam, hogy letöröltem már mindent, a git-et, arduinót, pythont.Visszatettem telepítettem újra az Arduinót, meg amit linkeltél, illetve letöltöttem azt a zip-et amit a git szedne le. Látszik is az eszközök között az esp32, de nem képes rá feltenni a lefordított programot: exec: "C:\\Users\\viktor\\Documents\\Arduino\\hardware\\espressif\\esp32/tools/esptool.exe": file does not exist Hiba a(z) DOIT ESP32 DEVKIT V1 alaplapra fordításra. A get.exe nem csinál semmit, pedig admin joggal indítom. Már azt a zip fájlt is letöltöttem amit elvileg a get.exe töltene le, de abban nincs esptool.exe.
A lényeg akkor annyi lenne, hogy a C:/Users/[YOUR_USER_NAME]/Documents/Arduino/hardware/espressif/esp32 könyvtár megvan, itt le kéne futnia a get exe-nek, ami látszólag nem csinál semmit... Bár tegnap előtt mintha már lefutott volna egyszer 50 perc után, de akkor a program files mappa arduino könyvtárában volt az egész hóbelevanc. Az erőforrás kezelő szerint 35kb/s-mal tölt valamit, egyszer remélhetőleg kész lesz. Legalább valami tájlkoztató üzenetet kiírhatna, hogy dolgozik vagy hány %-nál tart...
A wemos d1 r2-vel is ennyi szívás lesz? -
Elnézést, hogy 3 lett, de van köztük majdnem 24 óra... Végigmentem tegap este a tutorialon, de még mindig nem látszik az esp32-es lap. Ott van a hardware mappában hozzá minden, amit itt írnak, de nem jelenik meg a válsztjató eszközök között. Még egy újratelepítést megpróbálok.


 Működik a Wemos lap is. Pedig ezzel arövid kis fehér kábellel használtam régebben, biztos megtört valahol.
Működik a Wemos lap is. Pedig ezzel arövid kis fehér kábellel használtam régebben, biztos megtört valahol.
 ja, meg csúnya is szegény jármű.
ja, meg csúnya is szegény jármű. 







 Pedig már majdnem örültem, hogy kész. Én már kééész vagyok idegileg tőle.
Pedig már majdnem örültem, hogy kész. Én már kééész vagyok idegileg tőle. 





























Új hozzászólás Aktív témák
 ekkold
ekkold- 2013 Late 27 iMac - 1TB HDD i5 core4 24GB RAM 2GB GTX
- Bomba ár! Toshiba Portege R930 - i5-3GEN I 4GB I 320GB I DVDRW I 13,3" HD I HDMI I Cam I W10 I Gari!
- Bomba ár! Toshiba Portege X30-E - i5-8250U I 8GB I 256SSD I 14" FHD I Cam I W11 I Garancia!
- Bomba ár! Toshiba Satellite Pro A40-D - i5-7200U I 8GB I 256SSD I 14" HD I Cam I W11 I Garancia!
- Bomba ár! Toshiba Dynabook A40-G - Intel 5205U I 4GB I 128SSD I 14" HD I Cam I W11 I Garancia!
- ÁRGARANCIA!Épített KomPhone i5 14400F 32/64GB RAM RX 9060 XT 16GB GAMER PC termékbeszámítással
- Bomba ár! Dell Latitude E5440 - i5-4GEN I 4GB I 320GB I 14" I HDMI I Cam I W10 I Gari!
- DOKKOLÓ BAZÁR! Lenovo, HP, DELL és egyéb más dokkolók (TELJES SZETTEK)
- Playstation 4 Fat 500 GB + kontroller 6 hó garancia, számlával!
- Bomba ár! Toshiba Portege R930 - i5-3GEN I 4GB I 320GB I DVDRW I 13,3" HD I HDMI I Cam I W10 I Gari!
Állásajánlatok

Cég: PCMENTOR SZERVIZ KFT.
Város: Budapest

Cég: BroadBit Hungary Kft.
Város: Budakeszi